跟着无人驾驶汽车正在汽车行业中变得越来越要紧,守旧的卫星导航定位精度大致正在10米把握,亏损以应对自愿驾驶和车联网V2X的场景。从目前的L2等第的高级驾驶辅助系
跟着无人驾驶汽车正在汽车行业中变得越来越要紧,守旧的卫星导航定位精度大致正在10米把握,亏损以应对自愿驾驶和车联网V2X的场景。从目前的L2等第的高级驾驶辅助体系 (ADAS) 到半自愿驾驶,再到他日的全体自愿驾驶 (AD),无人驾驶体系功用的繁复性正正在快速加添。相应地,有两个方面的宏大离间。
正在各类不妨的条目和变动下验证自愿驾驶和车联网功用对汽车开垦范围提出了宏大离间。比方,自愿蹙迫制动 (AEB) 和自适合巡航限定 (ACC) 之类的功用,以至是正在高速公道自愿驾驶条目下的全自愿功用,都需求正在众种场景和车辆设备下,对车辆举办大宗的功用性和非功用性的验证和优化。
目前,ADAS 和 AD 验证首要采用两种办法:正在民众道道或试验场前进行驾驶测试和基于硬件正在环 (HiL)或者整车正在环ViL的测试。

GNSS商场正在许众成分的驱动下正正在急迅生长,因为车联网商场、无人驾驶的闪现,车载导航的请求也正在不绝加添,从最初的规范定位SPS(Standard Positioning System)需求,生长到现正在的高精度定位PPS(Precise Positioning System)需求。

SMBV100B和SMW200A是高性价比的通用矢量信号产生器,具备优异的射频目标,接济简直一切的通讯和播送规范,通过设备一个或众个可选选件,接济 GPS、Glonass、Galileo和BeiDou,是万能卫星导航模仿器。
◾ 及时卫星导航模仿器,接济GNSS一切频段,席卷:L1/L2和L5,且可单台仪表同时发作一切频段导航信号;
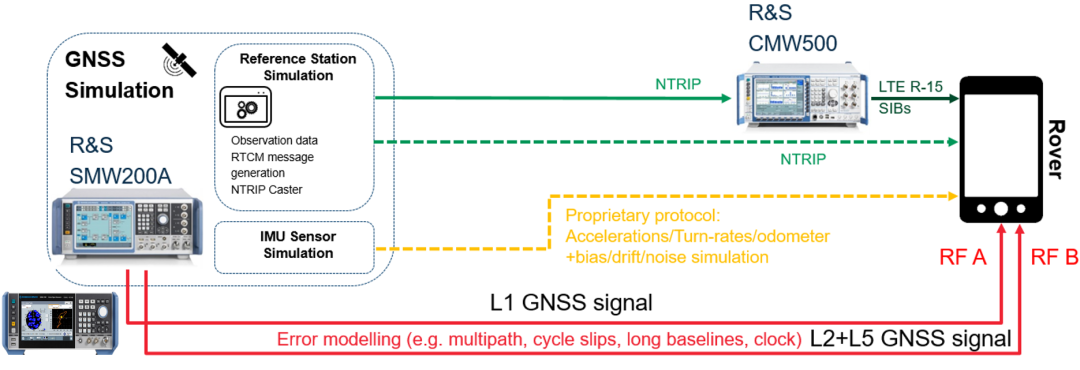
假设车载导航接受机或模块自己可能直接通过射频线缆直连,同时,供应串口的NMEA数据输出,则可能直接举办直连测试。此式样的上风是精准限定功率和屏障外界搅扰。假设车载导航接受机仍旧做成制品了,无法供应射频接口直连的式样,则可能运用OTA的空口测试办法。如下图所示:
GNSS众频接受机可同时接受统一个导航信号众个频率的载波信号。诈骗众频载波信号受电离层延迟影响的差别性,可能排挤电离层对电磁波信号的延迟的影响。所以,GNSS众频接受机可用于长间隔周到相对定位。此外,GNSS众频接受机借助于正在两个频率上或众个频率上的观测可加快整周笼统度的解算。
SMW200A或SMBV100B都可单台仪表告终众频信号发作,如下图所示,通过SMBV100B告终L1/L2/L5大肆频率组合式样的测试框图:

载波相位动态及时接受机RTK:Real – Time Kinematic。是及时处分两个丈量站载波相位观丈量的差分办法,将基准站采撷的载波相位发给用户接受机,举办求差解算坐标。
此类接受机,自己即是具备高精度定位功用,大无数都邑采用双频/众频接受机的定位式样,目标是提升定位精度。同时,正在校正数据的传输进程中,有私有汇集和公有汇集,私有汇集首要是通过ASK/FSK/WLAN的通讯式样,民众劳动正在ISM频段,如433MHz。公有汇集民众是基于运营商的挪动通讯汇集,如:GSM、LTE等。其测试框图如下:
硬件正在环是一种测试办法,个中,被测筑立或体系(DUT或SUT)被嵌入到模仿器体系中,该模仿器体系首要及时地模仿筑立或体系的实正在境遇,应许正在闭环中及时评估其正在全体体系中的机能。HIL测试中的一局限是GNSS卫星信号的仿真。为此,运用了GNSS模仿器,比方R&S SMBVB或SMW,如下图所示:
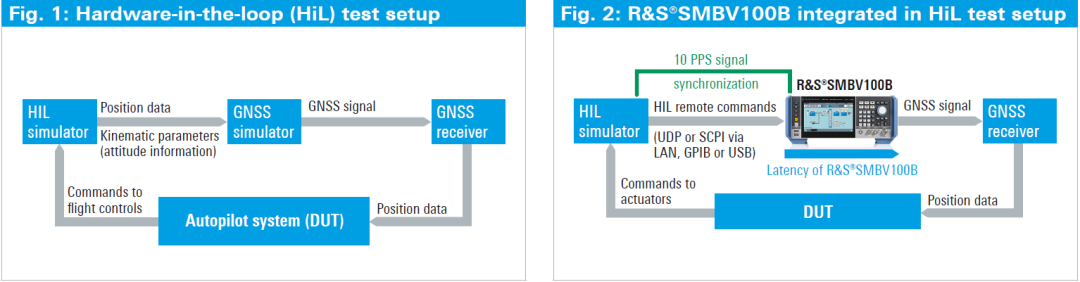
一切R&S GNSS模仿器都可能及时举办长途限定,可能集成到动态HIL境遇中。正在GNSS HIL仿真器中可指示地方数据和动力学参数,比方速率,加快率和加加快率,而GNSS模仿器可及时且无信号停滞地调理仿真的运动,还可处分HiL仿真的车辆容貌讯息,比方俯仰,侧倾和偏航值。正在HIL运用中,SMBV和SMW高达100Hz的数据更新率以及低至 20 ms 的处分延迟联合保险了高处分效果和信号精度。
R&S SMBV100B/SMW200A都接济自愿化测试,可能正在操作界面手动限定或长途限定。长途限定需求正在上位机通过LAN、GPIB或USB相联SMBV。测试计划如下:
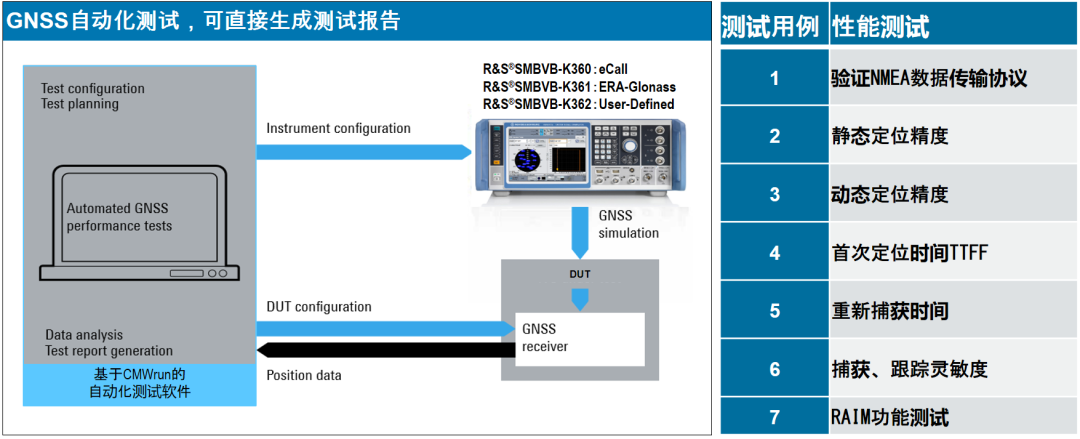
本文描绘了诈骗GNSS卫星导航模仿器举办的一系列规范车载导航接受机验证测试,涉及实质从基础的卫星导航定位测试、高精度卫星导航定位测试到车载卫星导航硬件正在环HiL测试计划。正在GNSS接受机测试境遇中运用的规范GNSS信号仿真器可为工程师供应最大的灵动性,助助他们实行调理和限定,轻松地举办反复测试。
汽车测试网-首创于2008年,报道汽车测试时间与产物、趋向、动态等 接洽邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


