据美国兰德公司商量:从统计学角度开拔,自愿驾驶汽车须要正在确凿或者虚拟境遇中起码举行110亿英里的里程测试,才气说明自愿驾驶体例比人类驾驶员更牢靠;然而,基于里程的测试手段具有测试周期长、效力低、本钱上等流毒,自愿驾驶汽车要贸易化落地,纯粹仰赖基于里程的测试手段分明是不足的,基于场景的仿真测试手段不行或缺。
实际天下中的场景具有无穷丰饶、极其杂乱、不行预测等特质,正在虚拟境遇中要全体复现这些场景却又特别的贫窭;怎么欺骗有限的测试场景去映照出无穷丰饶的天下是完成自愿驾驶测试验证的环节。基于场景库的仿真测试是目前办理自愿驾驶途测数据匮乏的主要门途。场景库中的测试场景对实际天下的笼盖率越高,仿真测试结果的切确性就越高。
接下来笔者把比来一段韶华合于测试场景和场景库干系的练习体悟整饬出来与公共分享,如有表达不切确或者失误的地方,接待各大佬品评赐正。
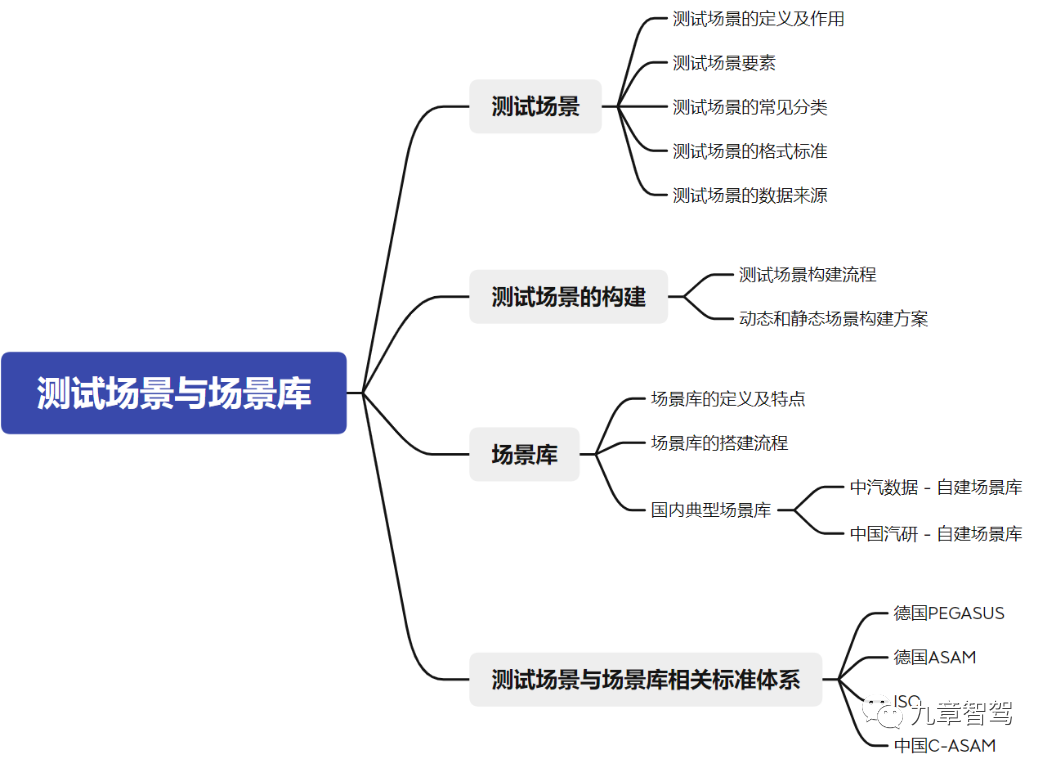
自愿驾驶测试场景:是指正在必定的韶华和空间畛域内,自愿驾驶汽车与行驶境遇中的其它车辆、道途、交通措施、情景前提等元素归纳交互流程的一种总体动态描画。它是自愿驾驶汽车的驾驶现象与行驶境遇的有机组合,既包含各式实体元素,也涵盖了实体实行的举措及实体之间的连结相干。
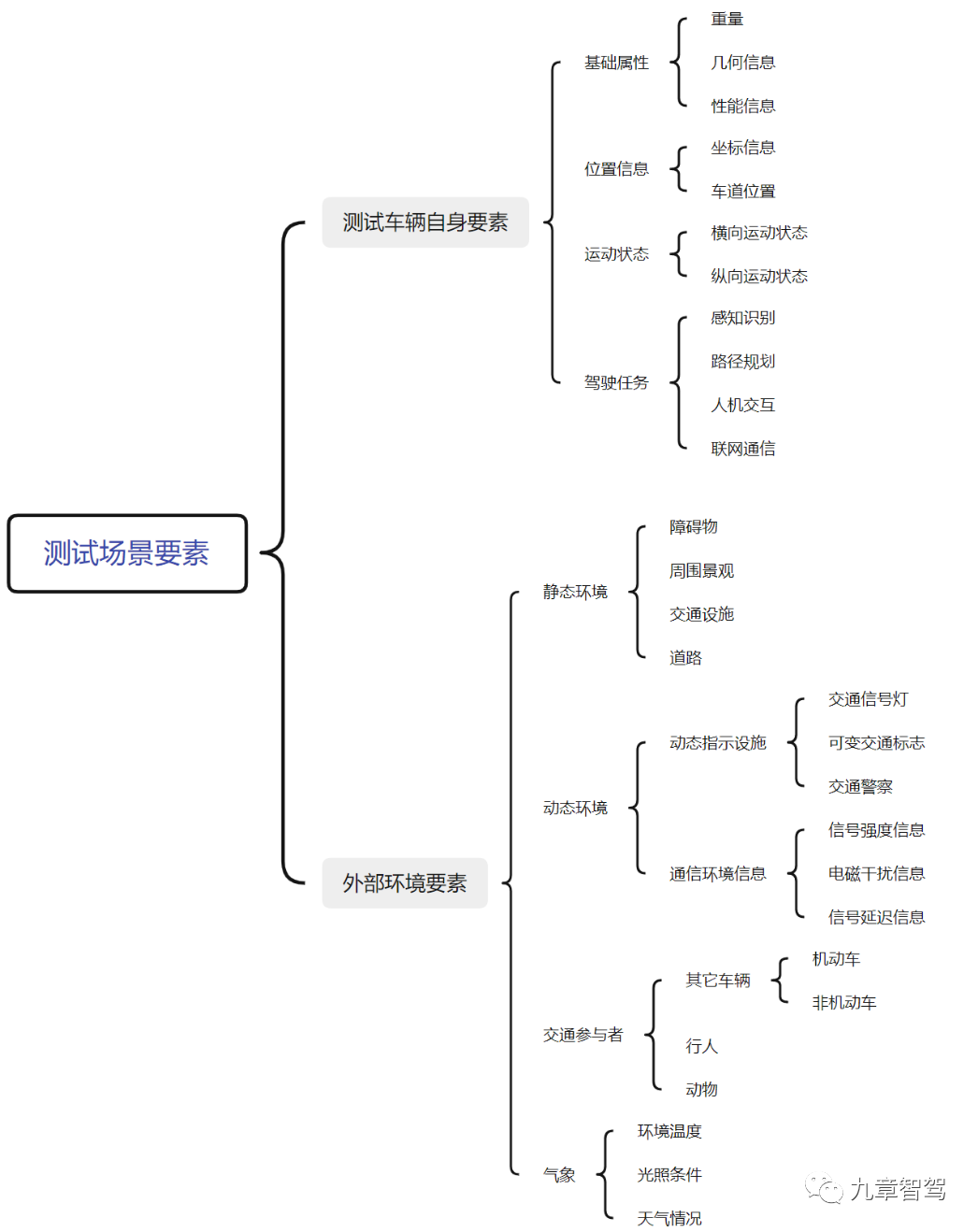
测试场景因素:重要分为测试车辆自己因素和外部交通境遇因素两大片面;外部交通境遇因素又涵盖:静态境遇因素、动态境遇因素、交通列入者因素、情景因素等.
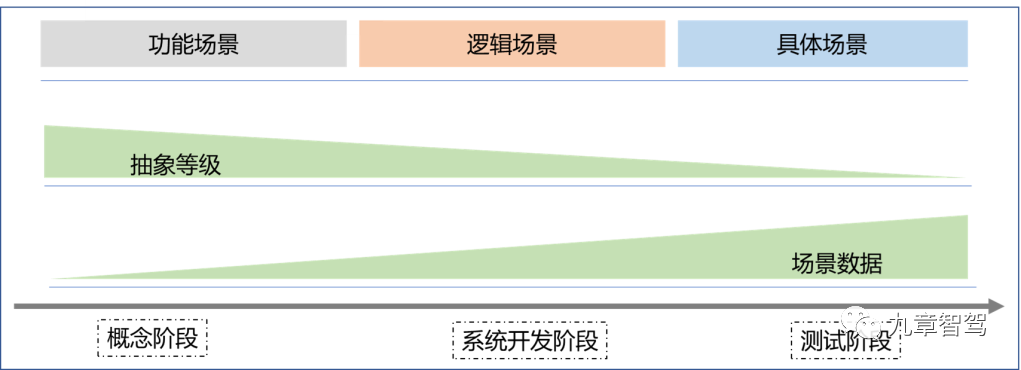
自愿驾驶体例开垦需通过的三个阶段:观点阶段、体例开垦阶段、测试阶段;跟着体例开垦流程的渐渐深化,测试场景的概括水平需求不息消浸,但测试场景的数目需求却不息正在增进。通过将组织化的功用场景与参数畛域相集合也许转换天生逻辑场景,参数畛域可能通过数据驱开始段来界说。每个逻辑场景都可能通过从参数畛域被选择的确值来转换为的确场景。
• 通过语义描画的最概括级其余操作场景, 即通过说话场景符号来描画场景区域内的实体以及实体间的相干;
•功用场景用于观点阶段的项目界说、危殆理会和危害评估;正在测试流程中,往往须要将功用场景转换为逻辑场景,并转换为可用于相应仿真境遇的数据体式。
•逻辑场景是基于形态空间变量对功用场景的进一步详尽描画,用于项目开垦阶段天生需求;对付每一个具有相连取值畛域的逻辑场景, 都可能派生出恣意数目的的确场景。
•通过确定形态空间中每个参数的的确值来昭着描画实体和实体间的相干,以形态空间详尽描画了测试场景;
•的确场景可能直接转化为测试用例;要将的确场景转换成测试用例, 须要增进被测对象的预期活动显露以及对干系测试措施的需求。
•数据源自汽车确凿的自然驾驶形态场景下,是最根本的数据出处;包罗自愿驾驶汽车所处的人-车-境遇-使命等全方位音讯;
•自然驾驶场景也许供应车辆数据、驾驶人活动、道途境遇等众维度音讯,是说明自愿驾驶有用性的一种满盈测试场景。
•危殆工况场景重要涵盖阴恶气候境遇、杂乱道途交通以类型交通事项三大类场景,是说明自愿驾驶有用性的一种须要测试场景。
•数据重要出处于现有的圭表、评判规程等,如ISO、NHTSA、E-NCAP、C-NCAP等众项圭表、评判规程对现有自愿驾驶功用举行了测试法则;
•数据出处于现有场景数据库资源,通过对已有的仿真场景举行参数化筑树,随机天生或自愿重组相应类型的场景;
•参数重组场景通过对静态因素、动态因素以及驾驶人活动因素等举行差别陈设组合及遍历取值,扩展参数重组场景界限;有用笼盖自愿驾驶功用测试盲区,是对未知工况的有用填充测试场景。
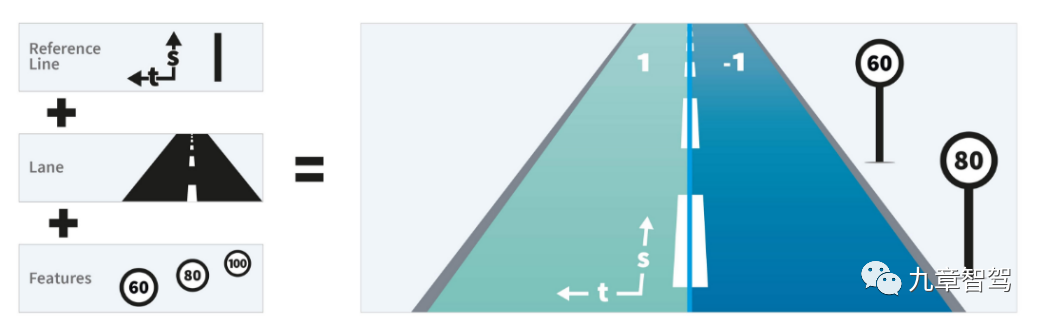
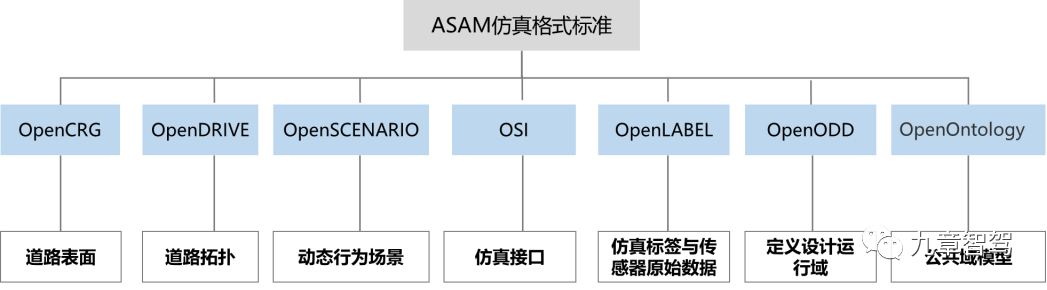
OpenDRIVE(OpenX圭表系列):包罗道途途网上的总共静态对象,重要描画道途拓扑组织、车道线和道途周边的其它静态元素。OpenDRIVE将道途分为三个片面:道途参考线(reference line)、车道(lanes)和特点元素(features)。
OpenCRG(OpenX圭表系列):重要用于描画道途的外貌属性,如道途的施工质料、摩擦系数等。
RoadXML:将交通境遇划分为四个目标;1)拓扑层 – 描画元素正在途网中的地位和连结相干;2)逻辑层-描画元素正在道途境遇中的事理;3)物理层-描画元素的属性(途面或妨碍物);4)可视化层:描画元素的几何形势和三维特点。
OSM:即OpenStreetMap-绽放式街道舆图数据体式;其数据基元重要包含三种-点(Nodes)、途(Ways)、相干(Relations)。
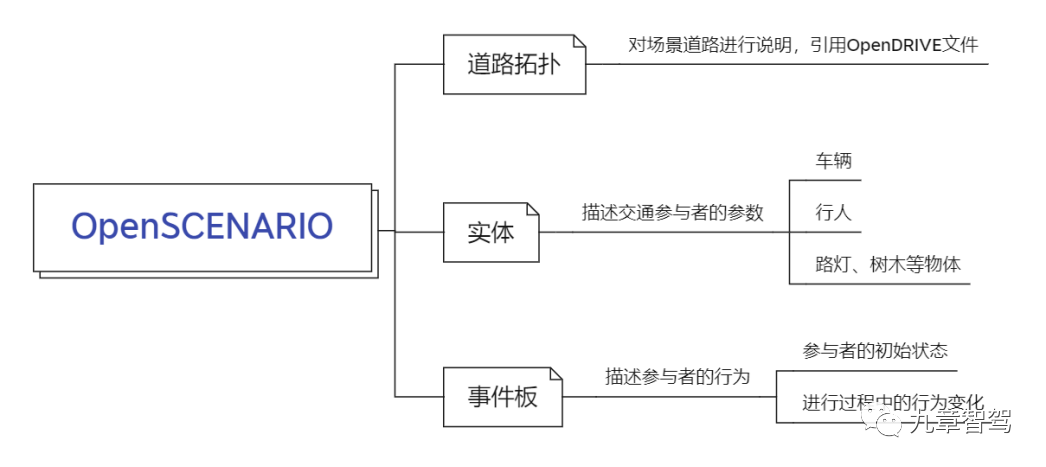
OpenSCENARIO(OpenX圭表系列):重要用于描画涉及众个交通列入者(如车辆、行人和其他交通列入者)的杂乱的、同步的操作;OpenSCENARIO文献组织可分为三个片面:道途拓扑、实体以及变乱板。
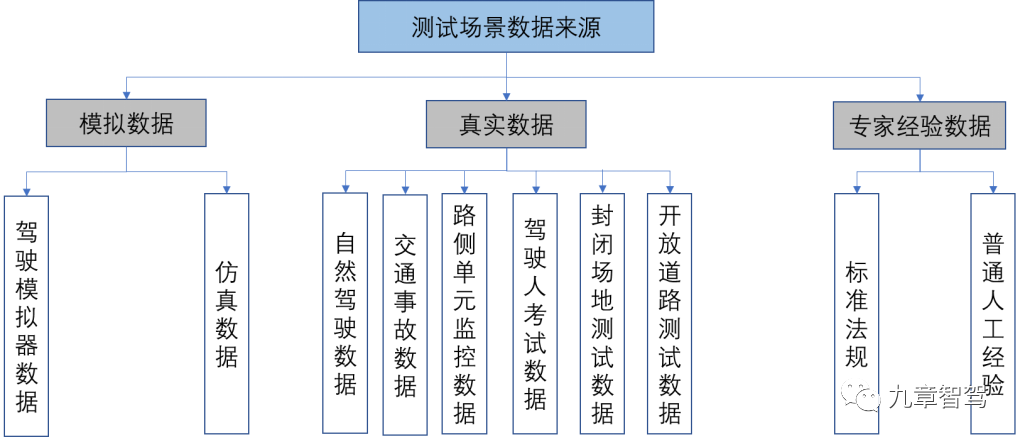
1)确凿数据:即实际天下确凿爆发的,颠末传感器搜聚到或以其它形势一经被记实存在下来具体凿场景数据,包含自然驾驶数据、交通事项数据、途侧单位监控数据、紧闭地方测试数据以及开垦道途测试数据等。
2)模仿数据:重要包含驾驶模仿器数据和仿真数据;前者是欺骗驾驶模仿器举行测试获得的场景因素音讯;后者是自愿驾驶体例或车辆正在虚拟仿真平台进取行测试获得的场景因素音讯。
3)专家经历数据:基于专家的仿真测试经历总结概括出来的场景因素音讯,个中圭表法则便是专家经历数据的类型代表。
搜聚需求界说:遵循自愿驾驶功用和等第、驾驶使命、评判维度等确定搜聚数据干系性;即遵循差别测试对象确定干系测试场景畛域和数目。同时搜聚的数据应餍足搜聚完好性哀求、数据搜聚数目、数据精度、差别出处数据的韶华同步性等哀求;
搜聚计划同意与实行:差别的数据源遵循自己性子采用差别的数据搜聚手段;目前常用的场景数据搜聚手段有 – 基于实车的场景数据搜聚、基于事项场景数据的搜聚、基于仿真台架的搜聚、基于途侧开发的搜聚、基于飞舞器的搜聚等;
数据预经管:为了便于后期数据理会,普及场景数据的可用性,正在举行场景数据存储收拾之前,须要举行数据预经管;数据预经管重要包含正在线经管和离线经管两个阶段;
数据传输与存储:为了保障有足够的车载存储空间使得搜聚事务也许赓续举行,正在数据预经管之后,须要实时将数据从车载存储器传输至数据库中。数据传输方法包含正在线传输和离线传输两种;数据存储计划包含当地存储和云端存储两种。
场景懂得:懂得测试场景中与主车行驶相合联的物体的寓意;比这样处交通象征代表什么寓意?,前哨车辆的活动妄念是什么?基于机械练习的场景懂得可能完成特点显示、模子练习、推理算法、懂得评判等。图像懂得干系算法:Faster R-CNN、YOLO等;
特点提取:正在场景懂得的根本上,对测试场景中的动态、静态元素举行特点元素和特点量的提取,然后举行数字化的描画;
场景聚类:正在获取豪爽的搜聚场景数据后,会出现有些场景相极其雷同,为了普及场景的测试效力,须要对具备好像特点音讯的场景举行聚类,对差别特点音讯的场景举行分类经管。常用聚类算法:DBSCAN、OPTICS、STING、K-MEANS和BIRCH等。
—— 场景复现:基于实车搜聚和途测开发搜聚具体凿数据,还原确凿交通中的自然驾驶场景和危殆工况场景等;正在可行的条件下,尽不妨高效、切确地响应出潜正在危害对自愿驾驶汽车的影响。
—— 场景重构:基于元素的相合相干或者人工经历等对场景元素举行从新组合或推演概括经管,从而天生更众合理的新场景。
•颠末上一步的场景理会开掘后,将天生新的测试场景,不过测试场景是否餍足哀求仍未可知,须要正在实车进取行验证试验或者正在仿真软件平台进取行虚拟验证。
•待场景验证试验完毕后,由专家按照干系验证试验数据从场景的干系性、确凿性和有用性三个方面开展评估。
•比方通过软件修筑道途(中央线、车道线等)、道途周边元素(垃圾箱、筑造物、绿化地等)以及交通元素(交通灯与交通象征牌)等静态场景元素。
1)基于确凿交通案例数据修筑:把各式传感器搜聚的动态交通数据,颠末算法抽取, 集合已有的高精舆图来修筑动态场景 。
2)基于确凿案例数据的泛化修筑:合理地安排确凿案例中的某些数据特点,譬喻对众元类型数据举行整合与加工, 通过算法修筑挨近确凿的智能体活动模子,从而泛化天生新的动态场景案例。
3)基于微观交通仿真体例修筑:基于确凿数据或虚拟仿真数据,欺骗微观交通仿真体例天生车辆、 行人、 交通管控等动态元素。
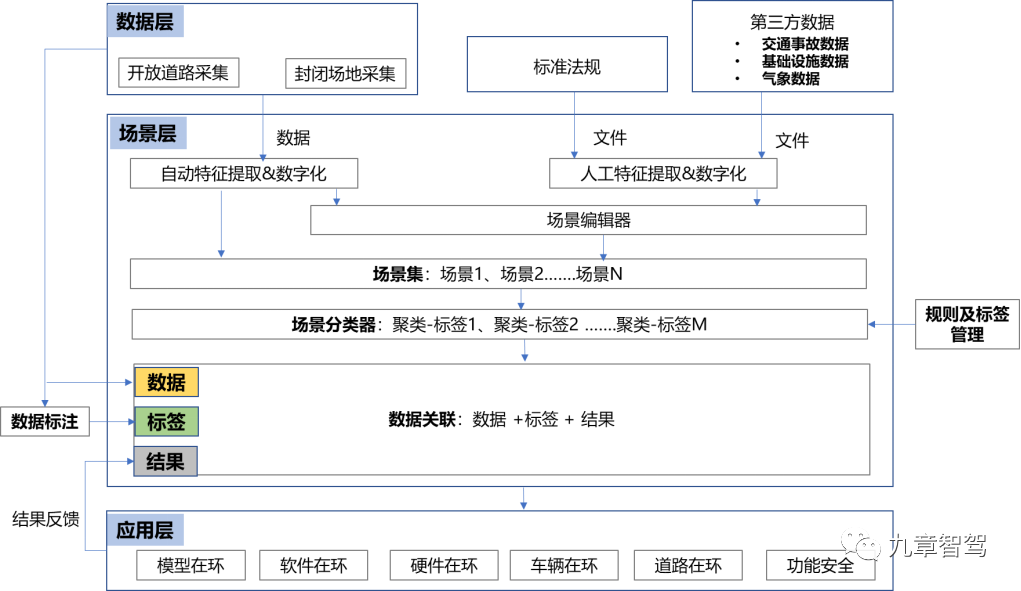
•基于确凿数据、虚拟数据以及专家经历数据等差别的数据源,通过场景开掘、场景分类、场景演绎等方法有层级、有经营地修筑成的一个完好的场景体例;也许完毕从场景数据的收拾和场景测试引擎之间的桥接,完成场景的自愿爆发、收拾、存储、检索、立室,末了自愿天生场景并注入给测试用具。
•场景库是差别场景的数据集中,以数据库的形势显露出来,便于对测试场景举行联合的、有用的结构、收拾和利用。
1)确凿性: 测试场景必需是实际天下中确凿存正在的,且高度还原实际景况;遵循测试需求,测试场景能正在统计学上笼盖实际交通境遇中的类型工况,从而保障正在仿真平台进取行虚拟测试也许必定水平上取代紧闭地方测试和绽放道途测试。
2)交互性:测试场景中人-车-境遇-使命各因素之间存正在较强的耦合相干,一朝场景中有一个因素爆发改变,极有不妨惹起连锁反响,直接对其它因素爆发相应的相合影响。
3)扩展性:测试场景中的各因素具有差别的类型和属性,而且各因素之间具有特定的相干。通过更改某一因素的属性或者对各因素举行从新陈设组合,便可直接重构出更众的其它测试场景。
4)无穷性:场景库重要由测试用例经虚拟仿真筑模获得;因为场景参数分散的相连性以及场景元素陈设组合的众样性,测试用例是无穷的, 因而场景库中的测试场景也是无穷的。
5)批量化:圭表化的驾驶场景数据接口,完成测试用例的批量化导入及筑模,以及高功能仿真任事器的批量化仿线)自愿化:当仿真测试遣散后,按照被测车辆的显露,场景库自愿化给出评判结果和目标。
自愿驾驶研发测试与场景库的搭筑变成闭环:测试场景库的搭筑,能有用驱动自愿驾驶的研发测试事务,自愿驾驶的研发测试反过来也也许场景库供应反应主张,丰饶场景库。
注:纵向驾驶活动目标包含速率、加快率、刹车踏板;横向驾驶活动目标包含横摆角速率、车道更改地位、宗旨盘转角、转向灯行使景况。
实质:聚焦于高速公途场景的商量和理会,基于事项以及自然驾驶数据筑态度景数据库,以场景数据库为根本对体例举行验证。
•基于现有汽车打算流程,以安静为根本,打算一套足够乖巧的、鲁棒性强的合用于自愿驾驶功用的打算施行流程;且该流程也许吸取履行流程中的缺乏频频迭代优化。
•此项主意输出为一套用于实践室(仿真软件,台架等)以及确凿交通场景的手段和用具链;总体倾向便是正在参数空间中寻得碰撞敏锐度高的参数。

注:该三项圭表已于2018年正式从戴姆勒和VIRES转交ASAM举行下一步圭表庇护与开垦。
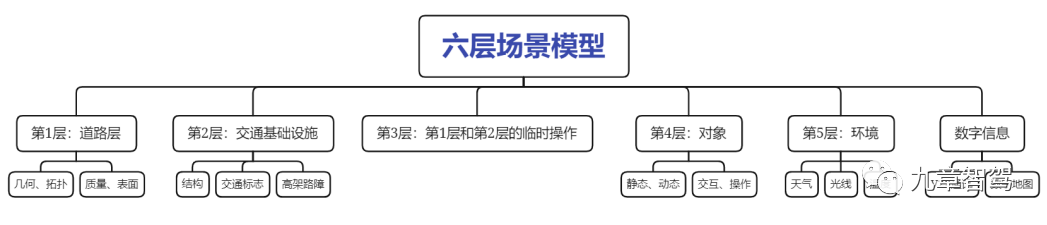
2)界说了测试场景六层模子:第1层 – 道途层;第2层 – 交通根本措施;第3层 – 第1层和第2层的权且操作(如道途施工现场);第4层 – 对象;第5层 – 境遇;第6层 – 数字音讯。
圭表实质:涉及众个汽车圭表范畴,包含仿真测试、车联网、衡量与校准、诊断、自愿化测试、软件开垦、ECU 搜集和数据收拾与理会等。
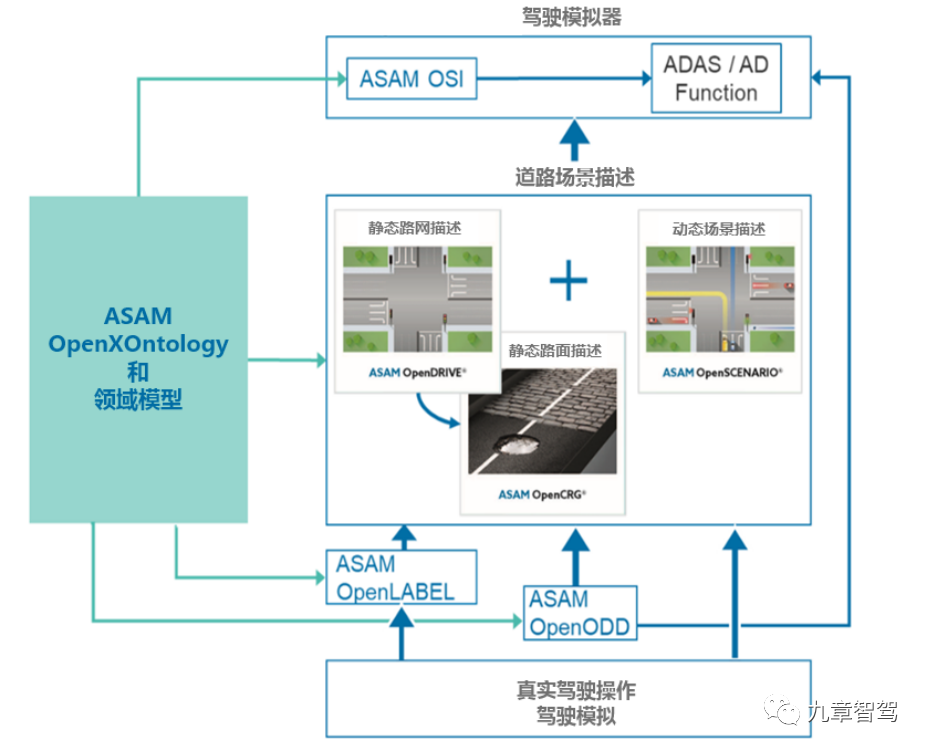
ntology :同意中的新圭表,一个由本体论显示的且也许将OpenX圭表串联起来的大家域模子
3)兼容性:援手与OpenDRIVE体式静态场景和OSI中动力学模子的交互,并与MATLAB等软件相兼容。
1)利用对象:各样仿线)功用:界说一个通用的接口,用来连结自愿驾驶功用的开垦和各样驾驶模仿框架
成员:上汽集团、腾讯、华为、百度、赛目、四维图新、北京航空航天大学等 20 余家中国企业与商量机构

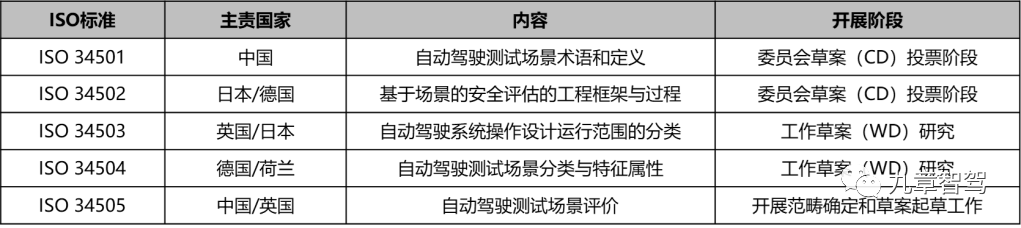
C-ASAM事务组商量框架及实质拓展(图片出处:2020中国自愿驾驶仿线 ISO干系仿真测试圭表
事务组:国际圭表化结构道途车辆委员会自愿驾驶测试场景事务组(ISO/TC22/SC33/WG9)
事务职责:职掌展开自愿驾驶测试场景相合的术语界说、流程框架、数据库、打算运转畛域及测试评判等国际圭表同意事务。
•面向自愿驾驶测试场景的实践利用需求,满盈探求目前国际畛域内已有商量实质和成就,同意自愿驾驶测试场景的“字典”以联合干系术语和界说的行使;
•正在圭表实质上通过同义词、说明和用例等形势进一步深化阐明各干系术语之间的相干,诱导自愿驾驶测试场景圭表、干系法则及工程利用中的观点联合。
实质:包含面向安静评估的场景天生流程、场景框架组织、数据库存储与接口架构、逻辑场景参数及道途交通参数采纳等实质。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


