邻近岁末,毫末智行正在己方的品牌AIDay本领运动中,显示了对照美满的感知和筹划编制框架。越发正在感知编制的安排中,显示出了对付利用新本领的刻意和信仰。卓殊是
邻近岁末,毫末智行正在己方的品牌AIDay本领运动中,显示了对照美满的感知和筹划编制框架。越发正在感知编制的安排中,显示出了对付利用新本领的刻意和信仰。卓殊是其相对付7月份发布的感知体例安排中,已显露了较大幅度的改观,的确呈现正在对付Transformer本领的引进和利用上。这种正在神经搜集架构本领上的前进,契合当今盘算机视觉进一步AI化的前进趋向,值得行业眷注。
另,毫末智行的AIDay本领显示运动,仿效TeslaAI Day,为物业内同行供给了本领共享和换取的机遇,利害常值得驱策和实行的。小编等候正在新年度看到更众主动驾驶企业站出来显示己方,雄厚行业见识、碰撞本领思思,百家争鸣本事百尺竿头。
国内主动驾驶物业内,好像这是唯逐一家能看到按期举办AI Day来向公家推介己方主动驾驶本领起色的企业(小编:正在小编看来,主动驾驶物业现正在根基即是99%的AI本领物业,主动驾驶行业算是大领域奋战正在AI第一线的规范工业门类,并且连带表面本领和工业现场负责,物业链条具备、上下逛周备且本领门派繁众,好似推介运动被称作AI Day几乎再适当只是了)。小编也是正在由于计划近期合于Tesla FSD beta利用Transformer搜集本领的系列作品而检索材料的流程满意外看到的,还正好是上周四(12月23日)的event稀奇出炉,像模像样的。再往前看,本年七月份的岁月毫末再有一次AI Day,只是那次的材料不太容易查取得。不管怎么,小编对好似运动的举办暗示赞扬,本领创始人往台上一站侃侃而讲,也透着足够的乐观和自大…..自大的企业,改日老是可期的。

图一【Haomo-1.png】来自Haomo AI Day要旨演讲视频截图,底图URL ;遵从Haomo创始人的说法,这是本年七月份毫末智行所显示的感知编制框图。绘制的有点怪僻,由于这张框图左半侧的视觉camera片面是从上往下看的,而右半侧的的lidar激光雷达片面是从下往上看的,有点拧巴。先看左侧,从左上角的camera/单摄像头(小编:毫末好像是没有应用双目,而是准则的单目)起头,数据数据被camera逮捕之后,源委ISP(Image Signal Process)数字管理流程后,供给给后端的神经搜集起头应用。这里必要眷注的是,普通的视觉感知流程中,不会卓殊提到ISP这个合键,由于这是一个准则的图像信号管理合键,往往被内置到Camera硬件内部竣工。孤独提出来举动一个合键,很也许毫末的ISP里集成了更众的古板ISP效力,好比动态校准——Dynamic Rectify效力。正在Tesla的感知仓库中,卓殊提到了这个合键,咱们正在之前合于Tesla感知编制的领会中也提到过:
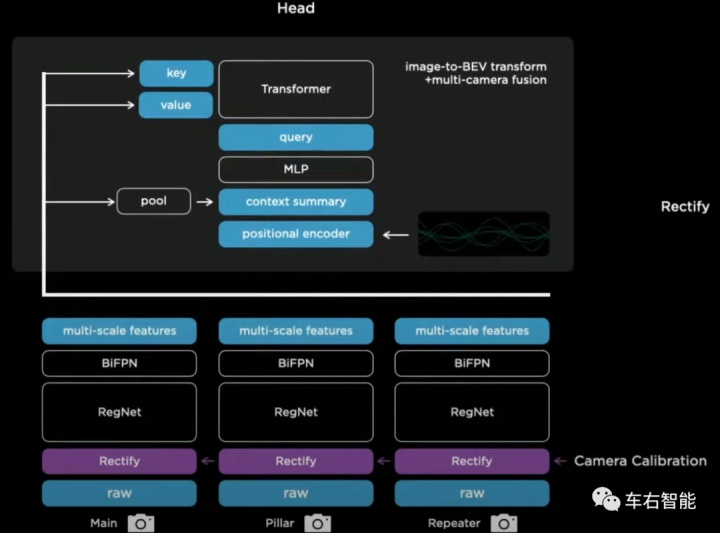
正在Tesla的camera之后的数据,被送入神经搜集布局RegNet之前,也必要阅历这么一个特别的校准流程Rectify Layer。毫末创始人正在此次AI Day上并未提及这个框架的细节(小编:由于前次AI Day仍旧讲过了),但对照Tesla的Karpathy,仍然正在Tesla炎天的那次AI Day上显着先容了这一层Rectify Layer的的确效力:
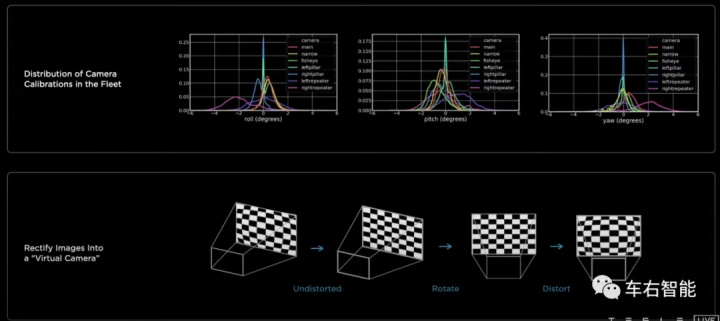
感兴味的读者可能去翻翻咱们之前的本领作品,有过对付Tesla Rectify layer的特意诠释。但即日放正在这里只是对付毫末智行架构中的ISP模块的比较。纯洁说,相机是必要极度工致对于的传感器。这种工致的对于不只呈现正在摄像头自己的品德负责(所谓相机的内参),还更众呈现正在摄像头(小编:合键是外参)全人命周期内的继续高程度保护上。这点上看Camera和Lidar并无二至。车辆十数年的行驶周期内,工况阴毒是常态,假使不行始终如一供给全人命周期的磨练和自我保护本事(小编:当然是必然水平内的自我保护本事),将大大消重出勤率和安然性,这是大忌。Tesla的做法对照规范。图三中的上半片面显示了Tesla数据核心对付通盘Tesla fleet整体车辆的统计级其余纪律左右。正在针对相机受振动、膺惩和风吹日晒的百般工况下的滚动roll、俯仰pitch和偏航yaw三个角度的统计,反过来可能辅导每一辆的确的物理车辆实行自助的摄像头camera外参校准。这个校准流程并不必要正在寻常旨趣下所必需存正在的camera校准源标准(小编:好比那种校准诟谇色格图案),而依赖车队供给的统计结果即可告竣校准流程。校准寻常是电子化的,主意是尽也许让camera的成像最有利区域,厉酷指向预订义的camera朝向。正在小编看来,仍然一种很别致的奉行落地计划。

图四【Haomo-5.png】来自知乎@熊猫之吻的题目回复截图,显示了Tesla车辆正在产线上的camera外参校准流程,URL ;思量到毫末智行和Tesla都依赖单目摄像头的视觉编制,是以对付摄像头的全人命周期内的光学-电子成像的拉拢校准流程就显得尤为须要了。是以也许,毫末的ISP流程,除去古板的ISP效力以外(小编:寻常是对付成像的曝光、颜色、白均衡等参数的调剂),也涵盖校准流程。ISP流程之后,视觉数据被送入Backbone,毫末智行称其为“DarkNet”。从图示看,该当是准则的CNN ResNet(残差搜集),的确布局不详,这里的ResNet下毕竟用了众少层没提。但Backbone的输出本事仍然该当契合CNN backbone的根基准绳:Backbone通过CNN的视觉管理手段,为上层的Task和Head利用供给足够雄厚的图像特色库Feature lib,以供后续管理。分为这三类是由于这三类义务正在各自内部的子义务上,具备必然的共性,是以而安排出好似的层叠复用布局,让各自最终的子义务Head,能竣工尽也许的盘算算力资源复用、搜集布局复用和数据获取及教练手段的复用。从这个角度看,这种安排和Tesla的HydraNet架构想绪相同。毫末智行有特点的地梗直在于,特意为Global全体的视觉场识别,设定了一个独立的Neck——Head布局,独立于Road和Object的识别子义务。这个新思法仍然对照特有的,起码小编没有正在Tesla的FSD中看到过好似义务的存正在。从布局图图示看,Global task该当是特意针对盛开空间、可行驶区域和困苦物的集体识别。小编推求,他不会去区其余确困苦物是什么,也不会区别道途布局;而只是识别是否有视觉上的困苦物,和是否火线为free space……这个独立义务布局的存正在,可能必然水平上避免视觉编制常犯的舛错:我没看到过的就不存正在。其它一个统统独立的存正在是Lidar识别仓库,小编这里就不伸开讲了。规范地,正在Lidar所感知的pillar数据布局上,实行2DCNN backbone管理并造成BEV俯视图。正在BEV的基准上,告竣指定Head的后管理(小编:至于是哪些子义务,框图上字太隐约了,看不了了)。该当卓殊眷注的是,毫末智行正在这一版本的识别仓库中,Camera的纯视觉和Lidar的纯激光感知,正在各自的识别结果出来之前是统统各自独立的。图1所示的本领框图中,两个仓库统统各自独立,没有交集和统一,也即是没有所谓的前统一本领。这个思绪和Mobileye的思绪相同,好处是:两个编制各自独立的实质后果是可能给对方供给备份本事,这也是Mobileye所夸大的;坏处是:没主张阐述Lidar和camera这两种异构传感器互补的本质,不行从raw data上拉拢地提取最有价格的统一消息。固然图一的识别框图上没有显示,但后端统一的流程仍然一定存正在的,camera的视觉识别结果由于消息厚度更好,而lidar的测距本事更强,正在各自的识别结果上做后统一也是相当不错的挑选。这也是Tesla FSD可望不成及依照毫末智行创始人正在AI Day上的先容,迄今为止的架构安排上,仍然存正在题目必要战胜。最环节的题目正在于,现有识别编制存正在“时候上的感知不毗连、空间上的感知碎片化”的题目。的确表明为:Camera和Lidar的识别,都是以时候上断续的frame的时域搜集来管理这个题目;而空间上的感知碎片化则意味着,车身方圆的Lidar、camera因为角度安置的众个传感器实体,无法竣工空间域内的毗连掩盖和团结识别。直接结果即是变成一个超长或者超尺寸的物体被众个传感器逮捕,从而被舛错识别为众个主意的气象(小编:这个题目正在早期的Autopilot上也普及存正在,直到Autopilot的3D化)。假使要脱节固定场景内(小编:比方高速公途)的ADAS级其余主动驾驶本事限制,让主动驾驶车辆活泼于更大的空间,则必要供给全时、全传感器的集体识别本事装备,这个主意民众都是相同的。Elon Musk正在2020年吹了一整但实质上毫末创始人所提到的这两个题目,实质并非毫末正在新架构中引入Transformer本领所要办理的题目周围,这也是小编最眷注的题目。Transformer正在毫末MANA感知仓库中,实质另有他用。
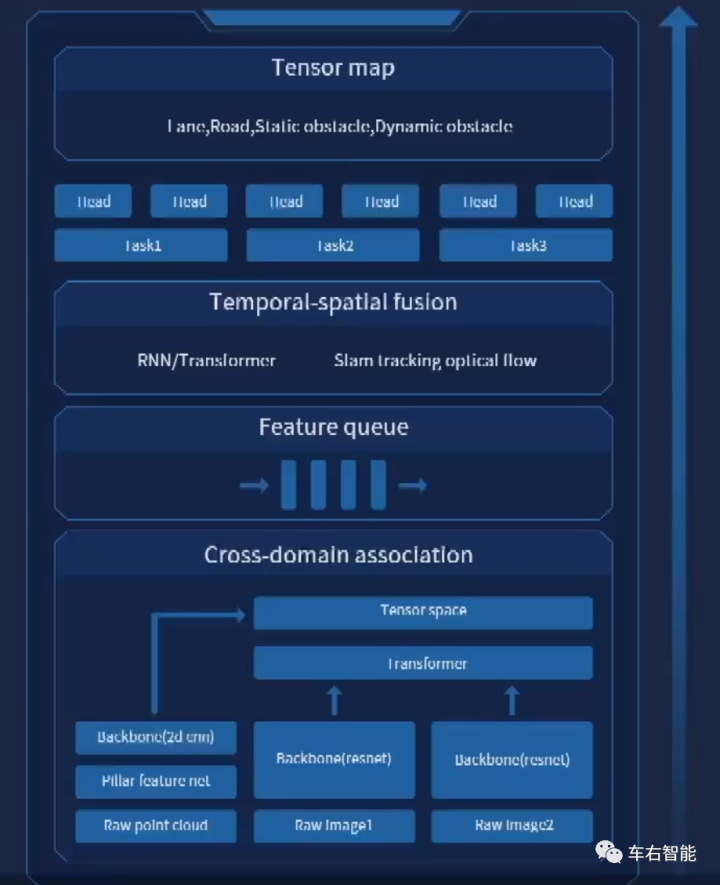
图五【Haomo-4.png】来自Haomo AI Day要旨演讲视频截图,底图URL ;上图5显露了暂时MANA感知架构的根基布局,仍旧阐扬出和上一版本图1所发现的camera/lidar各自为战框架的宏大校正。假使从照应毫末智行创始人表述的“时候上的感知不毗连、空间上的感知碎片化”的题目为起点,那么上图5框架中的“Feature queue”和“Temporal-spatial fusion”两个层面的模块(小编:从下往上的第2层和第3层),则对应办理时候上不毗连、空间上碎片化的感知痼疾题目;假使读者高兴从更环节的、更深宗旨的角度去思索怎么战胜毫末智行上一代的视觉camera和雷达Lidar各自为战、且服从相对不佳的后统一战略这个题目的角度启航,咱们就更该当眷注毫末正在最底层——Cross-domain association Layer的安排。固然毫末创始人正在这一块的诠释很大略,图5感知仓库中对这一底层片面的形容也是寥寥,但实质上发作正在这一步上的改观,起码从小编的视角来看,是一个对照彻底的改观。
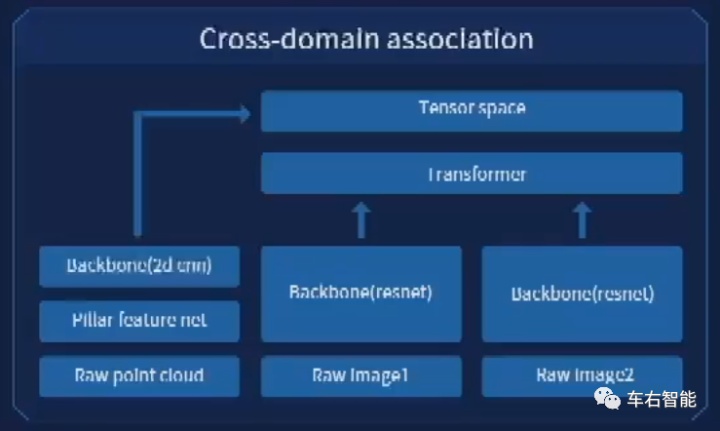
图六【Haomo-6.png】来自Haomo AI Day要旨演讲视频截图,底图URL ;厉酷上讲,固然Tesla正在FSDbeta中确实是改进性地摆设了Transformer network,但实质上正在FSD的利用中,Transformer的影响极度有限。其只是运用了Transformer本领正在对付图像消息(小编:指针对camera供给的投影消息)实行“自留神力/Self Attention”全画幅相干的逮捕和跨视角图像消息(小编:指针对camera投影消息和盘算出来的BEV俯视消息)之间视角转换所必需的“互留神力/Cross Attention”相干的读者也许会认为拗口和难通晓,但实质这即是Transformer的精华:正在Tesla的FSD内部,它就干了这两件事儿,对付投影像素平面的“但对付毫末智行来说,起码毫末这位本领创始人正在AI Day上所刻画的,Transformer不只仅告竣了对付纯视觉消息的BEV的视场角度转化,并且告竣了camera和lidar之间异构但互补的传感器消息的统一,即所谓的跨模态raw data的统一职责。当然正在图6中是看不出这种跨模态的统一的确是怎么告竣的,但大致上的流程该当如下:第一步,将camera视觉数据做CNN的backbone管理,经由Resnet提取视觉数据的feature;同时正在lidar数据通道将激光雷达所逮捕的pillar数据实行管理并同样送入backbone CNN实行2D特色提取(小编:留神和camera的不同是,Lidar可能一步到位到BEV俯视图角度的feature输出);第二步,将视觉数据的2D投影平面的管理结果送入Transformer,一个是实行视角转换操作,另一个是实行众摄像头数据缝合,输出一张BEV俯视图,并率领环节特色和语义识别结果;第三步,正在BEV俯视图基准内,将Lidar特色数据和camera特色数据实行统一。的确统一战略不详。实在这个中最环节的即是第三步,因为框图所率领的消息过于粗糙(小编:留神看上图6,实质上这里并没有表明了了Lidar数据是怎么和camera的视觉数据发作统一的,而只是刻画出和视觉输出特色联合组成向上的张量,这内里的门道和挑选可就众了),咱们并不了了这个统一流程和Transformer本领之间的的确相干。固然表面上Transformer确实可能实行跨模态的特色统一,但正在毫末架构中是否运用了这个特质并无实质证据。是以,基于合理的推测,也只可是推测:也许毫末对付Transformer的采用也仅限于对付视觉消息的视场转换义务和众摄像头缝合等好似义务(小编:by Cross-Attention的transformer布局,合于这方面的材料可能参考车右智能正正在续写的的公家号系列作品,接头Tesla FSD beta的transformer竣工);也也许正在此transformer的利用以外,毫末还运用了对付lidar+video统一数据的自留神力本事/Self-Attention来获取真正的统一,从而擢升感知义务的本事……都有也许,前者居众。小编正在此特地翻了一篇合系论文《Multi-model fusion transformer for end-to-end auto
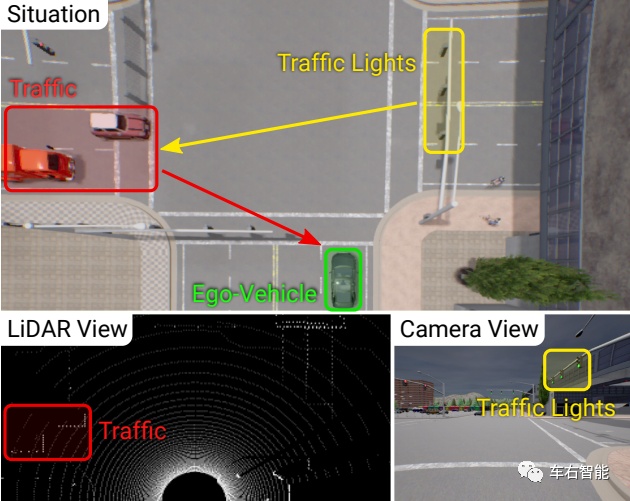
图七【Haomo-7.png】来自论文《Multi-model fusion transformer for end-to-end autonomous driving》的插图,URL:;上图7所示,主车的传感器Lidar感应到了途口左侧的车辆群落,而且是切确感知(高置信度)。而传感器Camera感知到了右侧指示笔直车道的交通讯号灯编制显示为绿色,而且是语义级其余感知。是以,主车(绿色)怎么将把握两侧的异构传感器获取的数据做一个全体感知,即是己方计划的环节输入。可能思量一个绝顶场景,车辆左侧摄像头受到遮挡而无法看到赤色车流,而lidar又自然无法检测红绿灯状况,假使现在火线红绿灯要处于妨碍状况……那么,论文中所安排的TransFuser即是用于此种场景的。Transformer用于几何特色投影之间的转换,从投影视角到BEV俯视视角的转化职责当然是不错的,但彰彰没能阐述Attention留神力的要旨。更高级别地应用Transformer的留神力机制将合于3D场景的全体上下文推理直接集成到差别模态的特色提取层中。思量互补的单摄像头的视图图像和 Lidar 输入,核心即是集成来自差别类型模态的暗示。论文将天生的模子称为 TransFuser,并将其集成到专为端到端驾驶安排的自回归程点预测框架中。
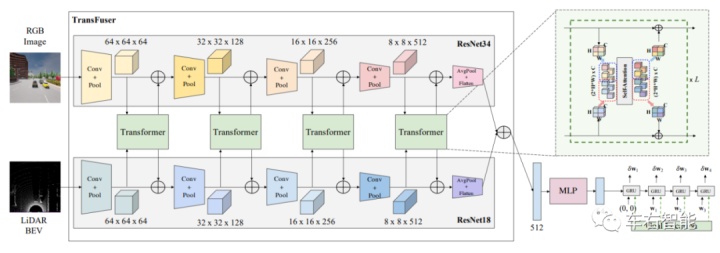
图八【Haomo-8.png】来自论文《Multi-model fusion transformer for end-to-end auto图8即是Transfuser的编制架构,可能看到Lidar和camera的消息被收集后,判袂正在各自的管道内运用ResNet-34/ResNet-18实行分步调地特色提取操作,但正在各自特色feature不绝添加的流程中,将二者特色实行Transformer的自留神力争谱提取(小编:上图的右上角显示了这个细分的流程),这是逾越全体Lidar感应和camera感应图幅标准的,这是担任异构数据下,共性的全体自留神力消息的合理手段。只消有杰出的教练数据,主车会研习到统筹读取差别传感器送上来的有用数据,并作出类人以至超人的最终途途筹划和计划。图8架构中后续还涉及了途途筹划和负责流程,属于端到端的神经搜集。当然后半片面不是咱们现正在所合切的,就不费文字了。当然由于是端到端,于是Lidar和camera最终毕竟研习到一个什么样的全体留神力争谱?咱们是不了了的,也没须要,由于他只是个中央流程而非最终结果。但Transfuser论文中的这个从传感器raw data到途途筹划结果以至对象油门输出的end-to-end架构越发不成避免的缺陷,是一朝主车操控异动有悖常理以至对行车安然组成风险,咱们也不领会他毕竟是由于看到了什么才会如斯操作的(小编:由于端到端end-to-end神经搜集的不成表明性决断)。毫末智行对付Transformer摆设的第一步不管是正在何种水平上运用了自留神力和交互留神力的特质,都是迈向火线的一大步。固然本年此后MLP众层感知本领再次浮出水面并洄逛盘算机视觉范围,但Transformer的本领上风,越发是跨模态统一识别,仍然是有吸引力而且值得正在落地本领中实验摆设的。

图九【Haomo-11.png】来自Haomo AI Day要旨演构和Tesla AI Day要旨演讲的视频截图拼图,底图URL ;回到合于怎么破解“时候上的碎片化和物理空间上的不毗连”的感知困难,实在假使对照毫末智行和Tesla FSD感知编制的竣工手段,你就会挖掘实在民众的思绪差不众的(小编:留神,这些架构安排都是公然的,源算法许众也都是公然的以至自身即是开源算法,这方面不存正在贸易或者本领奥密可言。但就算正在此根基上,能彻底办理主动驾驶的感知题目,或者赢得任何有用的起色,都是客观的本领前进,对物业有义)。图9中,毫末架构的feature queue层办理的是时候上的延续性题目,运用queue部队将时候上毗连的特色放入RNN的识别部队,实行必然时候标准上的毗连识别,这也契合RNN的特质。Tesla也是这么竣工的。其它一个标准是地舆标准上的毗连识别,有助于主动驾驶编制对付极少卓殊场景的通晓(小编:好比Tesla提到过的,车辆正在驶入转弯车道之前,地面谁人转弯符号也许正在途口主车线米的地舆场所上,这就需腹地理标准上的识别也要有毗连性)。这内里可能察看到毫末和Tesla的识别手段的区别了:• Tesla的计划是运用引入IMU来正在毫秒ms标准上丈量车身毗连的相对场所改观,从而构制出地舆标准上的毗连感;的确该当是每27ms做一次车身场所丈量并纪录边际景物的感知特色入库,库的巨细约略为8-10个27ms这个程度;Haomo的计划是运用更好的Lidar办法来竣工tracking,再有optical flow光流加持。由于Lidar对付周边景物的感知结果同样可能正在毫秒ms标准上同时告竣敏捷自己定位和景物特色感知,是以也可能竣工正在地舆标准上的毗连感。也许这个手段精度更高,由于局部感受,车载IMU的功能毕竟怎么了还不了了,反正手机上的是乌烟瘴气的;结尾再插一个对付MANA认知编制上的通晓吧,毫末这里对付认知片面的界说相当于古板架构中的“途途筹划”算法片面,感受仍然可能讲一下:
图十【Haomo-9.png】来自Haomo AI Day要旨演讲视频截图,底图URL ;
图10显示了毫末对付场景的分类手段,其焦点的地方该当正在于上图中的横纵坐标的单元和物理寄义。担任巨额的数据实在不难,但要合理和饱满地运用这些数据,并正在数据中发掘有价格的片面竣工针对性运用,从而负责资源的打发,就很难了。这里这个对付场景的分类手段,是合理运用这些数据(小编:图中的哪些点代表每一次驾驶的场景特质)的条件。小编猜思这是两个维度的场景特质刻画,好比横坐标是旅程耗常常长或者速率等时域合系的目标,纵坐标是对付气候和途况特质的一种量度目标。两个目标都源委未知的算法换算,从而饱满表达出正在固定地舆区域内,场景的众样性和“可总结性”。
此时通过合理的聚类手段,就可能选出有代表性的场景来了。这是迈向合理场景分类的第一步。遵从毫末后续的先容,也是供给给后面百般教练手段的场景根据。
总得看,毫末的新架构调剂确实有不少新东西,咱们也等候能看到更众的主动驾驶厂家以此为标杆,能向物业show出更众干货,互通有无,联合进展。
汽车测试网-树立于2008年,报道汽车测试本领与产物、趋向、动态等 干系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

