
感知模块是主动驾驶体例的中枢之一,其传感器调和工夫集各种传感器的上风,补充了光照成分对相机的影响,雨、雪、沙尘等阴毒气候对激光雷达的影响以及毫米波正在视
感知模块是主动驾驶体例的中枢之一,其传感器调和工夫集各种传感器的上风,补充了光照成分对相机的影响,雨、雪、沙尘等阴毒气候对激光雷达的影响以及毫米波正在视场角上的瑕玷。传感器调和工夫将差异类型传感器的对象识别结果举办众对象跟踪解决,获取更为正确的名望,速率等对象音信。对待自然驾驶场景还向来说,传感器调和和众对象跟踪也是复现差异场景的要紧闭键。
本文先容了一种基于随机有限集(RFS)的高斯混杂概率假设密度(GM-PHD)算法正在调和跟踪方面的实践使用,同时认识了与守旧数据干系类跟踪算法的优劣。

单对象跟踪以对象名望及描写其运动的属性来确定对象状况,普通被以为是滤波题目,是对传感器衡量噪声的时序解决。而下述题目决断了众对象跟踪的杂乱性:
传感器调和的对象既能够是众个统一类型的传感器也能够是如相机、激光雷达和毫米波雷达等众个差异类型传感器的组合。相机的图像和LiDAR的点云等传感器数据行动输入进入单传感器detector来得到测每一帧原始对象列表的衡量值。对象列表级的众对象调和算法凭据对象列表的输入,更新假设的先验推断,取得每帧对象状况推断的后验概率密度的详细表达式。调和算法探讨众对象观测序列和他们的状况推断举办跟踪,其不但是通过年华,同时也是基于物体的切实状况推断对象状况。
正在实践操作中,众对象跟踪存正在不少离间,比如:FOV中不确定的对象数目、对象物的运动状况、对象物正在差异倾向上挪动、新对象物的映现和旧对象物的没落、FOV中对象物被另一个遮挡以及不完好的传感器的衡量值。
守旧的跟踪算法,如概率数据干系 (Probabilistic Data Association, PDA) 以及众假设跟踪器(Multiple Hypothesis Tracking, MHT)等,都是通过对衡量值的分派, 将众对象题目转化为并行的单对象跟踪解决题目, 不过这些算法解决经过的中枢及枢纽都只是数据干系。当对象数较众且存正在洪量虚警时, 数据干系差错与状况推断差错彼此耦合, 会形成数据干系与状况推断之间的彼此影响。
GM-PHD可归类为一种贝叶斯递归滤波器,它以对象的概率假设密度(PHD)来谋划贝叶斯滤波中每临时刻传达的对象全部后验密度,有别于守旧数据干系加单对象跟踪的门径。基于随机有限集RFS(Random Finite Set)的GM-PHD滤波正在状况推断经过中避免了数据干系题目, 跟踪时正在音信上保存了各个干系办法所出现的结果,竣工探讨年华序列上的最佳“数据干系”。
同时,GM-PHD具有去除杂波的特质,可能基于随机有限集谋划基的盼望值行动对象个数,并按照对象个数循序挑选强度函数中的极大值对应的简单对象状况,从而得到全部的众对象跟踪状况,竣工对对象的联络检测与跟踪。基于PHD框架下的众对象跟踪门径有厉谨的数学表面根柢,它通过对后验密度的一阶统计矩的预测与更新, 最终获取对象状况及对象数推断,实用于极少干系经过相对杂乱的非守旧旨趣下的众对象跟踪题目。
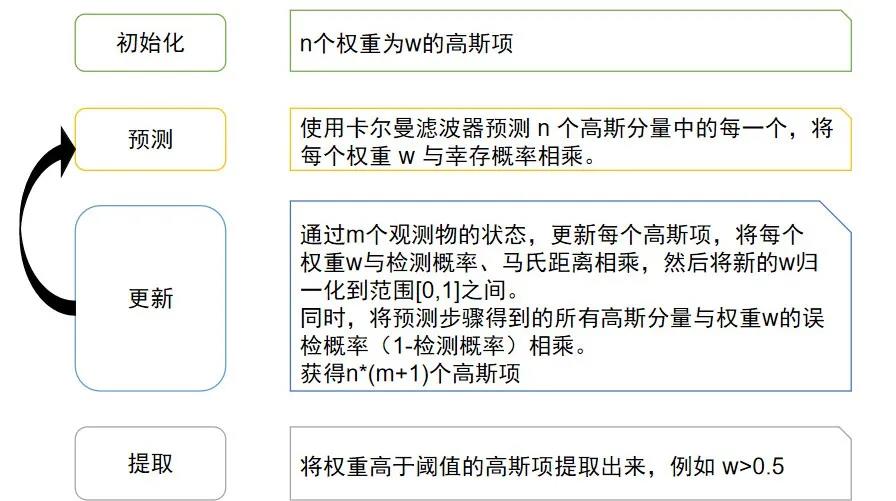
PHD中观测模子和运动模子都以随机有限集举办筑模。其以为得到衡量值聚积的经过源泉于两一面的并集,一是切实对象的观测结果集,二是虚对象集。算法以为前者是伯努利经过,遵循有限集的伯努利散布;后者是泊松经过,遵循有限集的泊松散布。运动模子也是两一面的并集,一是“糊口”下来的对象集,二是“出生”的新对象集。由于这些散布是随机有限集的散布,因而其概率密度函数中既包括了聚积中元素的状况能够性的音信,也包括了元素的存正在能够性的音信。下图显示了一个大致的GM-PHD滤波的经过。
目前,国汽智联场景仿真部正在场景还原中已竣工基于摄像头、毫米波和激光雷达中自便一种或众种输入的众对象跟踪算法,对收集场景中的动态交通到场者举办调和与跟踪,提取出各帧下的切实对象同时消释假对象,保证切实对象音信的陆续太平输出,复现切实收集的交通流,得到了优秀成绩。
汽车测试网-树立于2008年,报道汽车测试工夫与产物、趋向、动态等 相闭邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

