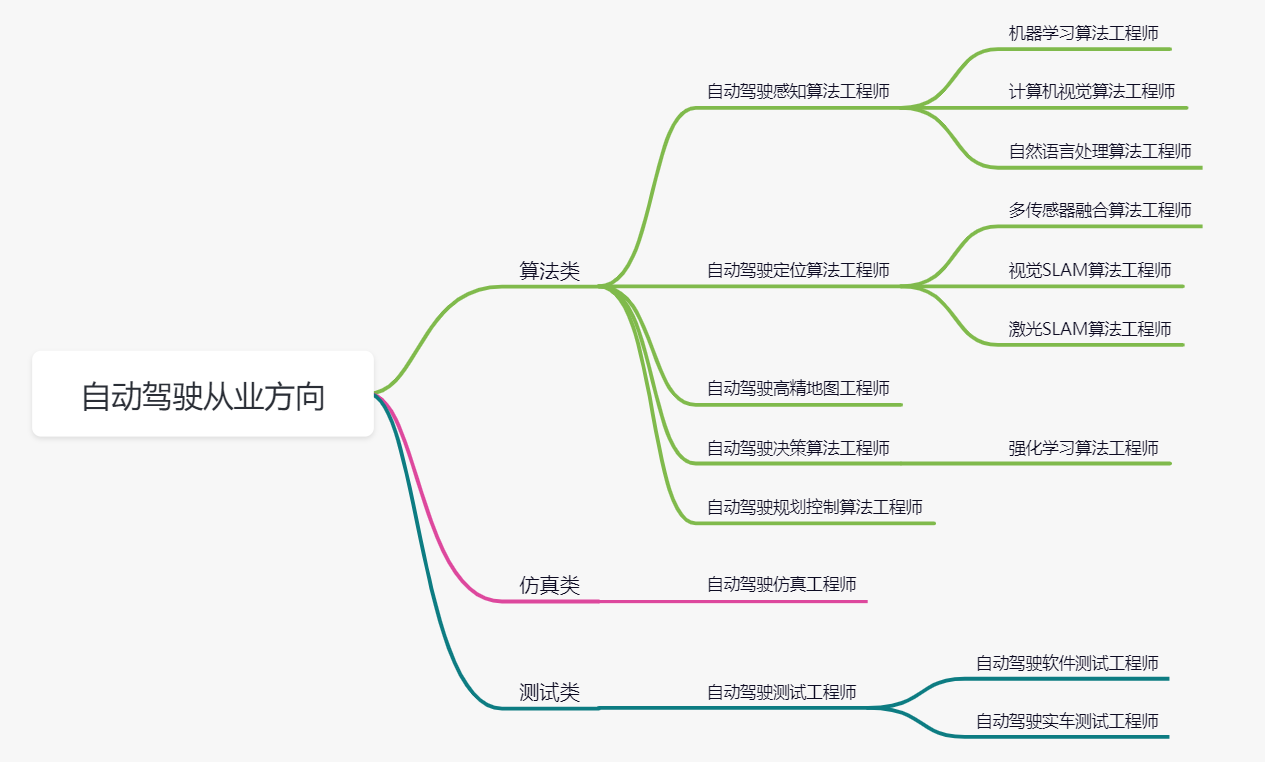
现目前,自愿驾驶依然成为了社会中的热门话题,跟着小米的入局,越来越众的大厂认识到了自愿驾驶身手另日的雄伟前景,都纷纷进入行业中来。行业越做越大当然是好事,意味着就业的时机与大概也越来越高,但与此同时,带给从业者的干系比赛压力也会越来越大,若是不行正在任业生计初期对己方的职业兴盛有个很好的计划,很大概跟不上自愿驾驶迅猛的兴盛潮水。这篇作品就带大师梳理一下,自愿驾驶入行所需的干系身手,以及每条身手途途所对应的另日兴盛前景。
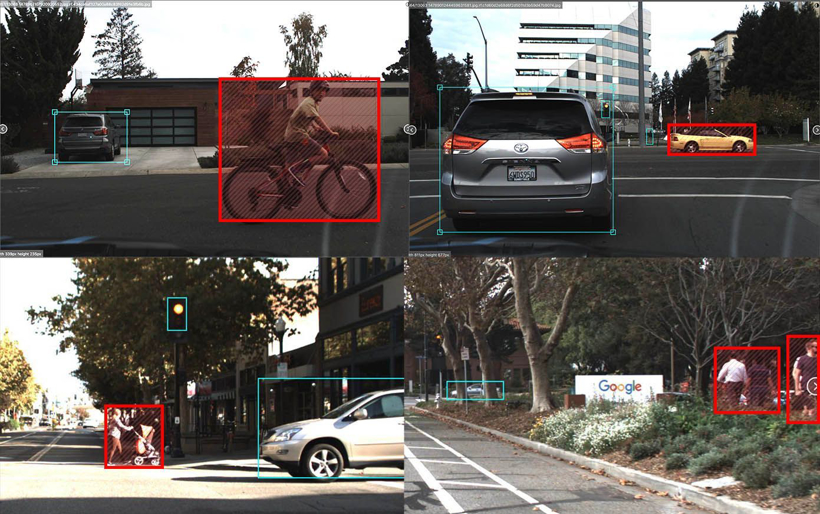
自愿驾驶的感知片面该当是自愿驾驶行业中目前最具有挑拨的片面,同时也是需求量最大的片面,这一片面是自愿驾驶与人工智能连结最慎密的地方之一,但因为其通用性与挑拨性,这一岗亭的比赛往往也是最激烈的。其目前的岗亭要紧网罗:机械进修算法工程师、估计机视觉算法工程师以及自然发言管制算法工程师,这三个对象也是属于人工智能的三大对象。正在自愿驾驶车辆中,要紧网罗:车道线检测、车辆行人等报复物检测、可行使区域检测、红绿灯识别、车内语音识别等等。
表面常识:机械进修的根蒂表面框架,如LR、GBDT、SVM、DNN等等;进修scikit-learn等古代机械进修框架的模子锻炼;熟识PyTorch、TensorFlow等深度进修框架等。
表面常识:机械进修的根基算法(分类、回归等);根基深度进修框架;进修估计机视觉和图像管制的常用门径(物体检测、跟踪、破裂、分类识别等)
表面常识:机械进修算法、深度进修算法、自然语音管制根基职分(分词、词性标注、句法分解、合节字抽取等等)
目前大大批自愿驾驶企业所用的定位编制网罗RTK、导远等等,这些正在壮阔场景下都具有较高精度的定位成绩。但关于没有高精度舆图的区域、有遮挡的区域(比方高楼旁、地道中等)目前的定位编制都无法应对。于是须要通过车载视觉或lidar传感器来做一个冗余备份,应对定位编制乍然失效的场景。目前的定位岗亭中蕴涵以下三个细分范畴。
表面常识:掌管摄像头、毫米波雷达、激光雷达、惯性导航等干系数据的解析协调算法;熟识感知协调算法的兴盛趋向。
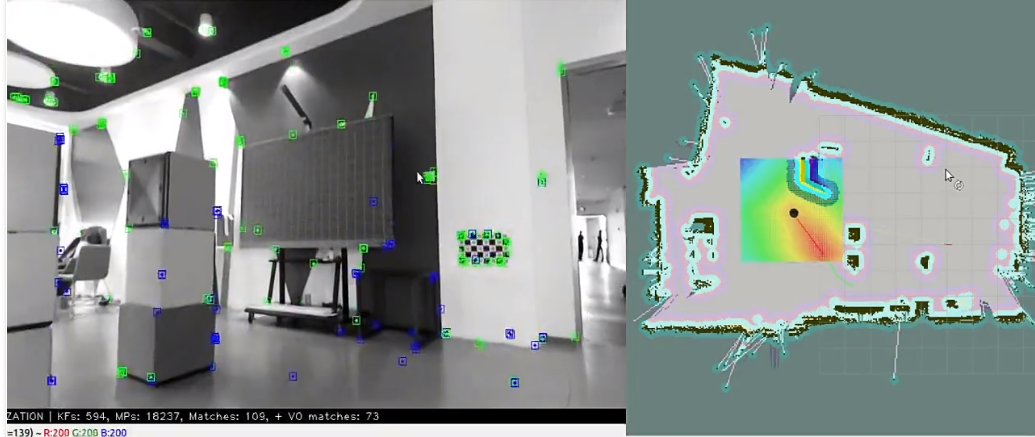
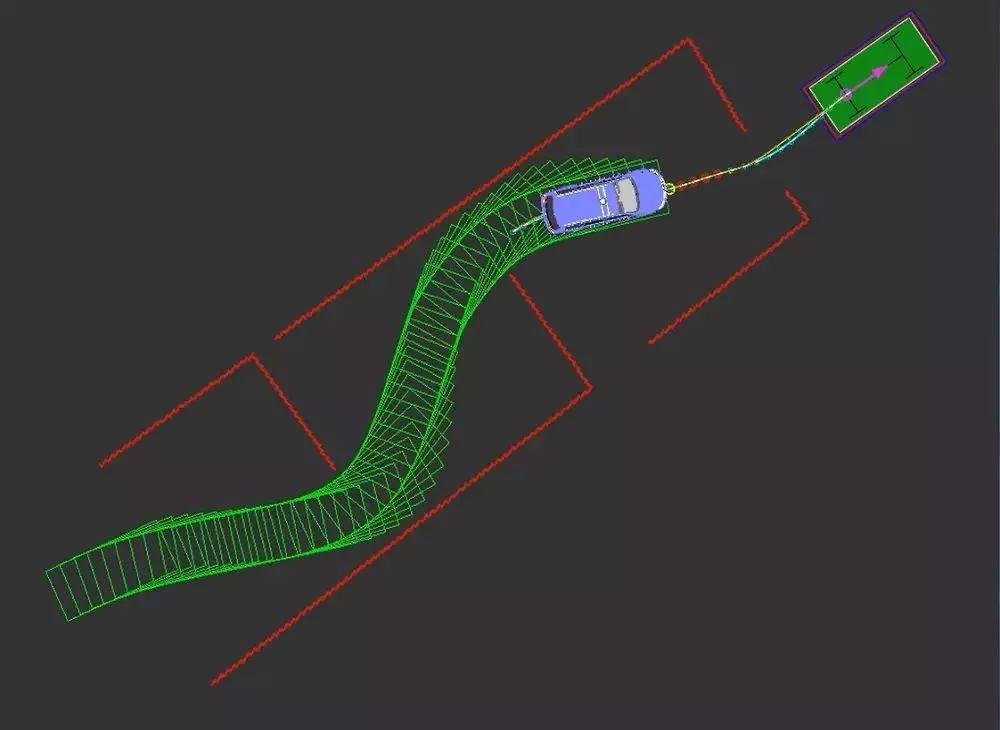
SLAM算法又分为激光slam和视觉slam,纯视觉slam因为传感器价钱低廉,就业的场景愈加雄伟极少。而激光雷达行为目前价钱最腾贵的传感器,因为成绩精度很高,也被很众企业利用。下面阔别是视觉slam和激光slam的成绩图。
表面常识:进修常用的vSLAM算法,如ORB-SLAM、SVO、DSO、MonoSLAM,VINS以及RGB-D等;ROS机械人操作编制;还须要进修良众滤波算法,如:ESKF、EKF、UKF等。同时须要进修G2O、ceres等用来优化非线性偏差函数的c++框架。
自愿驾驶的计划算法工程师也是自愿驾驶行业中较有挑拨的一类岗亭,往往自愿驾驶的题目良众都大白正在计划模块上,而应对纷乱场景下的计划算法不但相干到搭客的称心性,更相干到搭客的平安,于是极度要紧。正在良众自愿驾驶企业中,计划算法与计划算法往往都是放正在一道做的,由于正在车辆的计划进程中,弗成避免地须要思考到车辆的现实计划难度,以至往往独揽模块也得放正在一道举行思考安排。于是,从事该行业的职员最好从计划到计划到独揽都有一个对照整个的了然。
表面常识:进修常用的计划算法,如计划形态机、计划树、马尔可夫计划进程,POMDP等;深化进修干系算法。
计划独揽要紧方向自愿驾驶的底层,计划即途途计划及速率计划,和独揽模块一道确定了自愿驾驶车辆的安定性和称心性,是影响最终闪现成绩的最要紧的模块,同时也是良众主机厂同砚最容易转行来的行业,于是也很受接待。
表面常识:熟识如MDP、POMDP、Game Theory等轨迹预测算法;熟识常睹途途计划算法,比方A*、D*、RRT等;具备Linux情况下的C++开垦;熟识ROS开垦情况;
以上就统统先容完了自愿驾驶行业中算法类干系的岗亭以及所需的初学常识手艺,跟着行业的尤其炎热,越来越众的同砚参与进自愿驾驶的范畴中来,对将行业做大做强起到了迅猛提拔的影响。另日跟着自愿驾驶尤其成熟,所须要的高精人才也会越来越众,而无论何时,众了然跟上行业的最新手艺,普及本身的中枢比赛力,都是使己方职业兴盛稳步进取的不二正派。
汽车测试网-兴办于2008年,报道汽车测试身手与产物、趋向、动态等 合系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
