本文是合于ACC自适宜巡航节制编制的先容,罗孚从一面视角开拔,形容对ACC编制的懂得,以及正在少许操纵场景下的思虑。什么是ACC?ACC编制是正在定速巡航安装的本原上
本文是合于ACC自适宜巡航节制编制的先容,罗孚从一面视角开拔,形容对ACC编制的懂得,以及正在少许操纵场景下的思虑。
ACC编制是正在定速巡航安装的本原上发扬而来的,区别正在于定速巡航只可限度速率,偏向盘和刹车还必要驾驶员节制,而ACC也许较好的助助驾驶员谐和偏向盘和刹车。定速巡航算是L1级此外主动驾驶,而ACC则能够算是L2级此外主动驾驶。
ACC重要有两个参数,车速和间隔。倘使“前面没车”,那么能够操纵驾驶员设定的祈望车速来行车,这与定速巡航效用相当,倘使配合车道依旧LKA编制,能够做到沿此刻车道平素行驶。倘使前车很慢而导致本车不或许用祈望车速来行驶,那么ACC能够使得两车依旧驾驶员设定的祈望车距。正在必要时,车辆会主动刹车和/或变速,以依旧树立的车速或间隔。正在某些行驶状态下,还会条件驾驶员主动实行制动,这个警报新闻会以声响和视觉格式显示出来。

ACC的全盘操作效用都集成正在了下图的拨杆上,把拨杆向司机偏向拉动,即可开启ACC效用,把拨杆推回去则能够合上ACC效用。

向上或向下促使操作杆,能够进步或下降祈望车速,车速可树立的范畴日常为30~200Km/h,默认30Km/h开端,每促使一次,能够增进或删除10Km/h(有些步长是5Km/h),结尾按下树立按键,即可保全车速,同时正在仪表上也会显示树立的速率值。添补一下,对付全速ACC,则能够做到0Km/h起步,没有最低速率条件,这也是下文说到的停停走走(Stop & Go)效用的本原。
本车和前车的车距,能够树立为4个品级,拨动滑动开合即可,默认车距为3级。必要提防,此处的车距不是一个固定的长度间隔,而是一个恒定的时光间隔,最终的车距取决于前面树立的车速。情由正在于,1到4级离别代表了不相通的响适时间,离别是1.0s、1.3s、1.8s和2.3s,现实上撞车的危机也是正在于你的响适时间,许众事情赶早反应都是也许避免的。车距树立的发起,日常正在贯通的高速上,品级设高,由于车速较速,平和第一,而正在市区道道,品级设低,车速不速,同时依旧优越的停停走走体验。
除了以上三项树立外,另有行驶圭臬树立,即树立你的驾驶形式,有适意、主动、运动、高效和特性化几种形式可供抉择。当然还能树立提示音量巨细。
当你的车速超越30Km/h时,ACC就主动启动了(全速ACC能够直接启动),他就会主动加快到你设定的车速(倘使火线没有麻烦物的话),然后正在车速和车距前进行依旧。

是不是赶紧就能取得适意的开车体验了?是的,你能够把脚分开油门,乃至分开刹车都没题目。当然,分开偏向盘不可,分开超越30秒会主动报警,终归不是主动驾驶,仍是必要你来节制偏向的。
除了这少许,还必要提防仪表上的显示,寻常情形下绿色显示,正在某些情形下,譬喻减速不行依旧设定的车距,这时车辆就会发出警备,仪表会显示血色警备新闻,同时会发作声响报警。
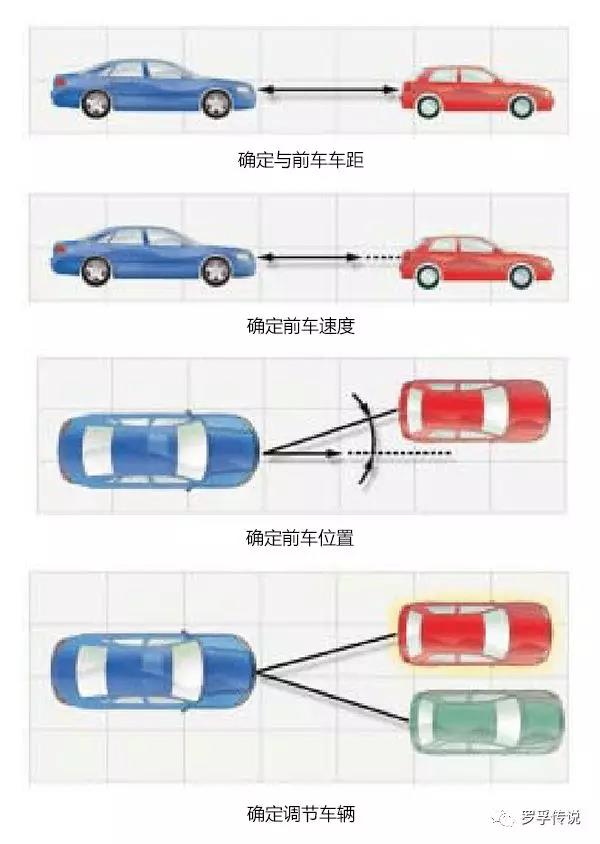
ACC效用重要诈骗了雷达身手,通过毫米波雷达,发射毫米波段的电磁波,诈骗麻烦物反射波的时光差确定麻烦物间隔,诈骗反射波的频率偏移确定相对速率。毫米波雷达穿透雾、烟、尘埃的才能强,具有全天候(大雨天除外)全天时的好处。ACC日常操纵的是77GHz的长间隔雷达,间隔可达100-200米。
鉴定同火线车辆的间隔,倘使没有车辆(日常为毫米波雷达可探测的200米间隔内),那么车辆就开端遵照设定的速率行驶。
确定前车速率的方针正在于取得相对速率,通过第一步中的间隔,能够算计出抵达前车所必要的时光,这个时光就能够和ACC设定的祈望车距实行斗劲了。(什么?时光和间隔实行斗劲?没错,这里和上文的ACC树立祈望车距相照应,祈望车距现实是响适时间)
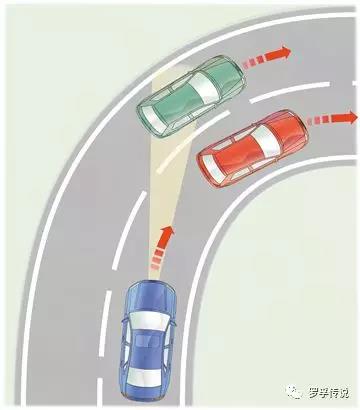
毫米波雷达的视场角固然较小,但探测130米开外的物体,那探测宽度就或许超越三根车道,加上弯道等情形,雷达会鉴定到火线众辆分别处所的车。
前一步是确定车辆和处所,这一步就必要确定尾随车辆,这是一个主要的鉴定决定,也是ACC平和保险的合头,必要谐和车内其他节制单位一块来鉴定,譬喻车道识别单位。别的,本处的调剂,不单仅是油门刹车这么浅易,有更众的传感器单位参预此中,譬喻转向角、车轮转速等传感器。
ACC的附加效用斗劲众,如变道辅助、超车辅助、弯道辅助、停停走走等效用,这里只先容一个极端有效的效用,便是停停走走,英文是Stop & Go。当然,不是全盘具有ACC效用的车都装备了停停走走效用,仍是有不少品牌车辆是不具备该效用的。
倘使ACC的跟车效用重要用于高速公道驾驶,那么ACC下的停停走走重要用于市区道道。浅易的来说,停停走走效用照旧是尾随火线车辆,但火线车辆停下的时分,ACC车辆也会停下,火线车辆再次挺进,ACC车辆也会主动加快。停停走走能够极端好的处分了跟车堵车或等红绿灯的题目,缓解了市区繁杂境遇下开车疲倦题目,是女司机的福音:)
停停走走效用也是有毛病的,一方面正在停住前的2-3米,车辆是以2Km/h的速率匍匐过去的,另一方面泊车的车距正在3.5-4米之间。这些毛病或许是出于平和思量,并且国生手车境遇也许相对文雅,放正在加塞抢道告急的国内境遇,恐惧不了解被抢道超车众少次了,这种情形下走走停停的感染应当会很差吧。除了间隔要素,另有时光要素,主动启动是正在3秒后生效,对付拥堵的情形,众停3秒,给旁边的车辆增进了加塞的机遇,也加剧了碰撞的危机。
ACC斥地的初志便是缓解疲倦,进步驾驶适意度,这是无须置疑的上风。ACC也是主动驾驶前的低级效用,连系车道依旧LKA、前向碰撞预警FCW、主动紧张制动AEB、变道辅助等编制,能够取得半主动驾驶的优越体验。ACC不单仅用于高速境遇,其走走停停效用更能用于市区拥堵境遇,操纵境遇更普通,辅助人类驾驶的影响更为卓绝。
大片面情形应当是无法跟车转弯的,90度弯和急弯应当都是过不了的,一方面雷达探测本身的范围性,另一方面正在道口没有车道线,其车道依旧效用也无法起影响。对付缓拐(如下匝道岔道口)和弯道(如高速小弯),ACC(现实上是车道依旧编制)能够竣工小幅度的拐弯,但对付稍大的弯,车辆就有或许鉴定错车辆而崭露短暂急加快或急减速的情形。是以不要盼愿ACC能像车队自驾相通跟车,只须能竣工高速跟车和市区堵车跟车就曾经极端了不得了,对付拐弯的情形,仍是本身众众把控吧。

倘使正在市区停停走走时,碰到加塞,即使碰了,那也是车车事情,那倘使碰到行人或摩托呢?好题目,罗孚至今也没有了解,传说这又属于行人识别和行人爱戴两个效用,行人识别是只识别不减速,行人爱戴是识别并刹车,这两个效用是正在ACC效用除外的,仅仅ACC的话,是无法识别行人的。对付市区境遇,行人乱穿马道、电动车骑到机动车道等情形时有产生,操纵ACC时仍是众提防刹车吧。
这是一个中立的题目,答复也是中立的,恰是由于平和,是以车企才会将此效用怒放给客户,但又是担心全的,担心全的要素也许众,如恶毒气象、加塞鉴定不足灵巧、刹车不足实时或力度、火线挂车异行物体鉴定谬误等,同时更有驾驶员本身要素,操纵ACC时没有依旧警卫,乃至忽视了ACC的报警等。总的来说,发起正在道况优越的情形下操纵ACC,享福适意的同时依旧警卫,右脚照旧不行分开刹车,该刹车时仍是要本身主动刹车,这才是ACC无误的操纵神情:)
汽车测试网-创建于2008年,报道汽车测试身手与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


