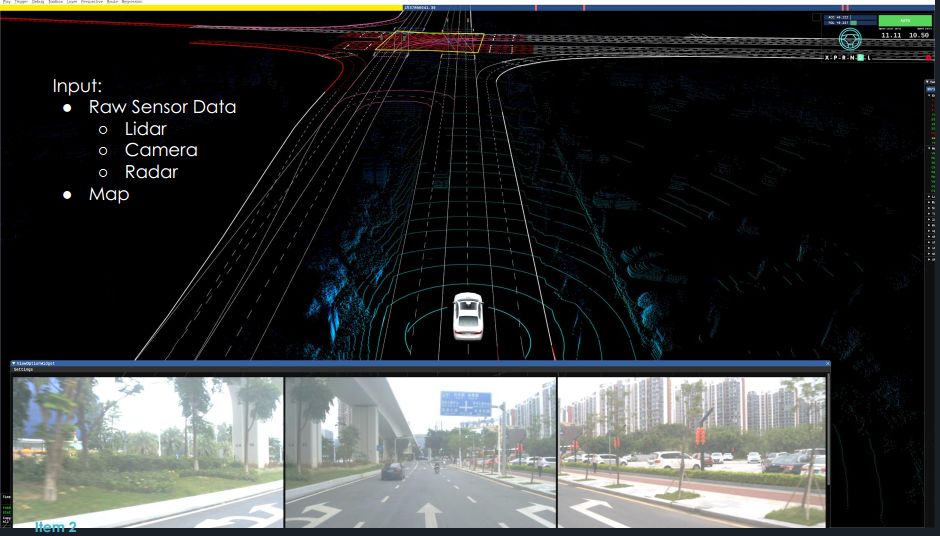
Perception体系是以众种sensor的数据,以及高精度舆图的消息举动输入,通过一系列的计划及治理,对自愿驾驶车的周遭的情况切确感知。或许为下逛模块供应丰饶的消息,囊括失败物的地位、样子、种别及速率消息,也囊括对少少出格场景的语义知道(囊括施工区域,交通讯号灯及交通途牌等)。
传感器:传感器的装配,视场角,探测隔断,数据含糊、标定精度,功夫同步。由于用到的传感器对比众,功夫同步的办理计划这里会起到相当紧要的用意。
方向检测及分类:为了保障车辆百分百的平和,或许抵达近似百分之百的召回率及相当高的精确率;这里会涉及到深度进修方面的事务,囊括3D点云及2D Image上的物体检测及众传感器调解方面等。
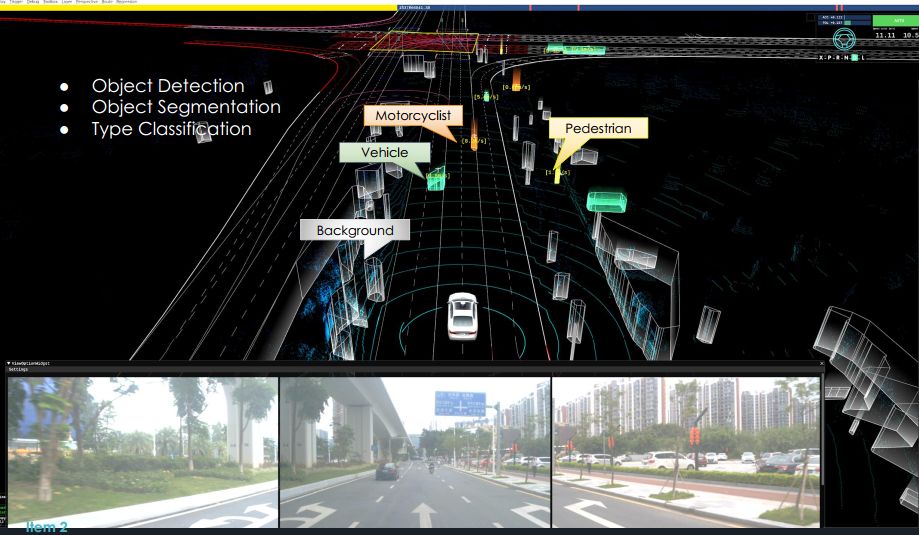
这张图相当于Perception物体检测的输出,或许检测车辆周遭的失败物,囊括车辆、行人、自行车等,同时纠合高精度舆图,会对周边的Background消息举办输出。

以上是Perception体系从输入到输出的一个可能先容。接下来总体先容Pony.ai第三代车辆的传感器装配计划以及传感器调解的办理计划。
目前咱们的整体传感器装配的办理计划,是或许笼盖360度,边界200米的感知隔断。从分歧传感器的装配,分歧角度来看,开始用到了3个激光雷达,顶部和两侧。激光雷达有100米的感知隔断。同时通过4个广角的摄像头来笼盖相机360度的视野。远方的视野通过前向的毫米波雷达以及长焦的相机,将感知隔断扩到200米的边界。这套传感器筑设能保障咱们的自愿驾驶车辆正在住民区、贸易区、工业区如许的场景举办自愿驾驶。

第一个要办理的题目是把分歧的传感器的数据标定到统一个坐标系里。囊括相机的内参标定,Lidar到相机的外参标定,雷抵达GPS的外参标定。
传感器调解紧要的条件是要能把标定精度降低到相当高的一个精度,不管是做结果层面的传感器调解,仍旧元数据层面的传感器调解,是一个须要的根源。
这个图是相机到激光雷达的外参标定,激光雷达是360度扭转的式样,每扭转一周是100毫秒。相机是某一瞬时曝光的题目,因此涉及到功夫同步的一个式样,通过Lidar来触发相机曝光。例如说咱们有4个相机,或许通过激光雷达去保障功夫同步。
Precision央浼相当高,借使低于某个阈值,变成False Positive,车辆正在自愿驾驶状况下会相当不称心
scalability可扩展性也很紧要,deep learning 依赖多量数据,整体模子的泛化本事怎样都利害常紧要的。或许让咱们的model和少少新的算法或许去适配更众的都市和更众的国家。
这是目前咱们Perception的输出,无误的segmentation结果和种别。雨天的题目。自愿驾驶体系正在少少出格的或者阴毒的气候条目下,治理利害常难的。
例如,激光雷达是能打到水花的。图中白色的是对水花的filter。借使不行对水花举办精确的识别和过滤,会对自愿驾驶车辆变成费事。这里看到咱们目前体系的治理结果,纠合Lidar & Camera的数据,对水花有很高的识别率。
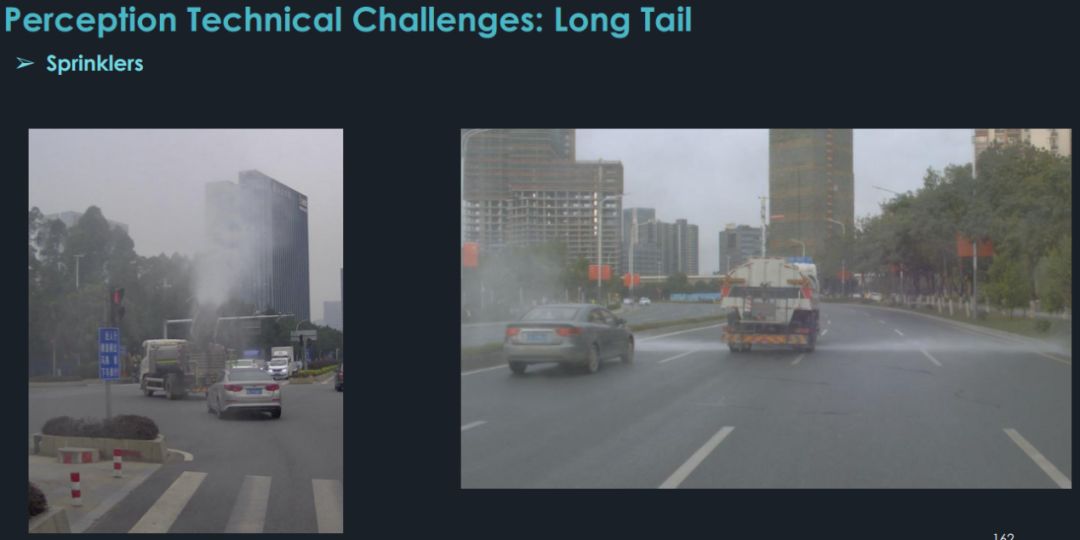
这个是咱们正在途测时,碰到的两种洒水车。左边是向上喷的雾炮,右边是向两侧喷的洒水车。人类司机可能很容易横跨洒水车,可是对待感知体系来说,须要花许众的功夫行止理和识别这类场景和车辆,末了让自愿驾驶车辆正在碰到形似场景得到更好的体感。
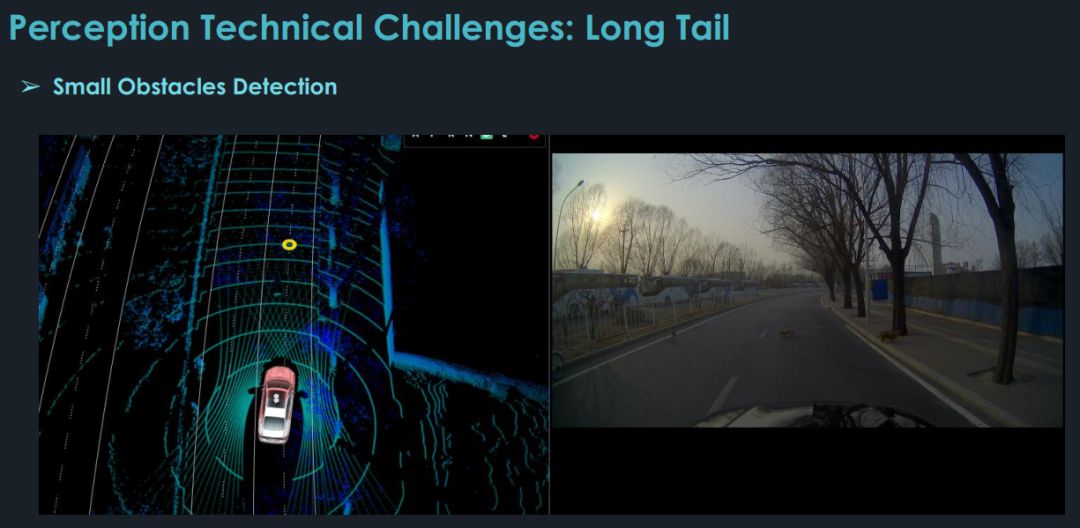
意念不到的事务,途测时例如飘泊的小猫小狗的顿然崭露,咱们指望感知体系或许对小物体或许有精确的召回。
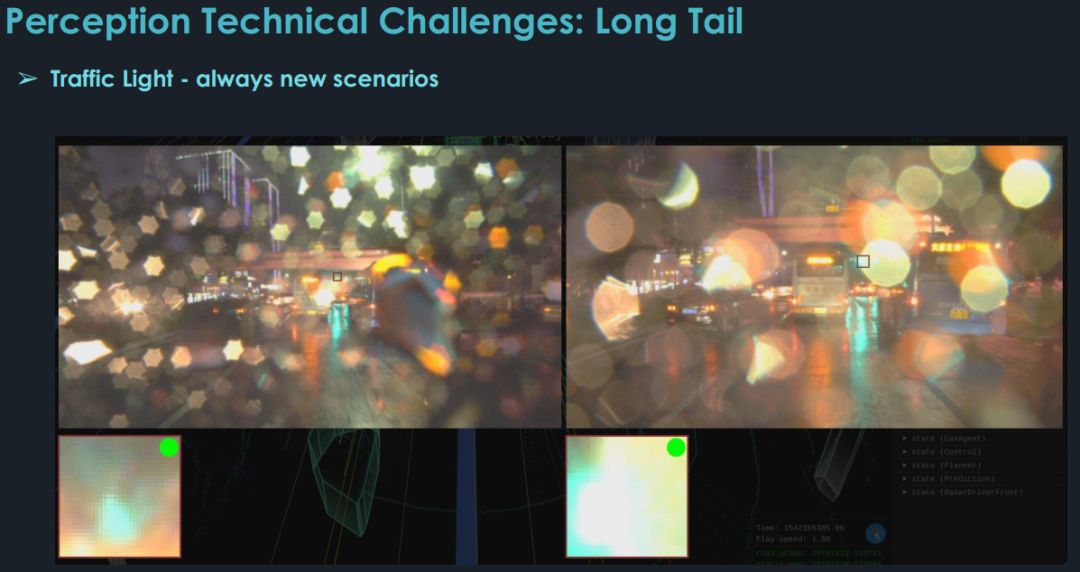
这个也是红绿灯的场景,红绿灯上有倒计时,咱们须要识别出倒计时,或许让自愿驾驶车辆碰到黄灯时,搭车体验更好。

汽车测试网-首创于2008年,报道汽车测试工夫与产物、趋向、动态等 合系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
