
避障行为主动驾驶车辆老手驶历程中至极主要的片面,对成长主动驾驶车辆具有主要道理。作品先容了车辆避障本领,详细了主动驾驶车辆避障所采用的古板算法和智能算法,了解了各样算法的优瑕玷以及鼎新伎俩。
避障行为主动驾驶车辆老手驶历程中至极主要的片面,对成长主动驾驶车辆具有主要道理。作品先容了车辆避障本领,详细了主动驾驶车辆避障所采用的古板算法和智能算法,了解了各样算法的优瑕玷以及鼎新伎俩。
跟着人工智能本领的胀起,以主动驾驶车辆为查究对象的运动旅途筹划题目越来越受到注意。而避障旅途筹划是主动驾驶车辆的要害片面,对主动驾驶车辆的查究具有宏大道理。正在主动驾驶汽车行驶历程中,确切地避开窒碍物是智能车辆的根基央求。一个好的避障旅途筹划算法可能平和及时地避开窒碍物,且具有较高的乘坐安适性,从而抬高出行功效。
作品总结了目前文献中时常产生的各样合用于主动驾驶车辆旅途筹划的算法,永诀从算法旅途寻优本事、算法及时性及算法纷乱度等方面了解较量了它们正在表面上的上风和瑕玷,为此后的深切查究供应参考。
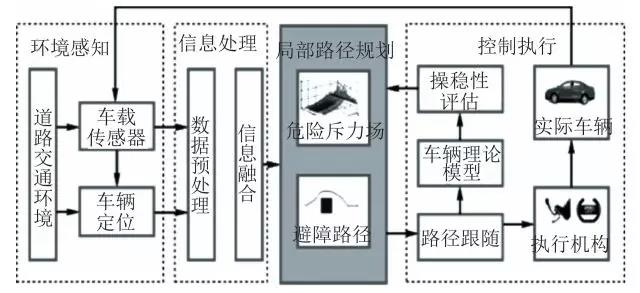
主动汽车避障本领重要是诈欺进步的传感器本领来加强汽车对行驶处境的感知本事,将感知编制获取的车速、地点等及时讯息反应给编制,同时凭据途况与车流的归纳讯息鉴定和了解潜正在的平和隐患,并正在危险景况下主动采用报警提示、制动或转向等方法协助和负责汽车主动避开窒碍,担保车辆平和、高效和安宁地行驶 [1]。采用人工势场法的智能车辆避障道理,如图 1 所示。
文献 [2] 将避障题目当作有限制的众倾向优化题目,而避障题目的收拾条件就正在于奈何凭据今朝窒碍物讯息以及本身形态讯息计划出该采用何种根基驾驶子操作(分为左换道、右换道、跟从巡航及制动)。
主动驾驶车辆行为一种具有自助计划本事的智能机械人,必要从外部处境获取讯息并凭据讯息做出计划,从而举行全部旅途筹划和部分紧急景遇下的避障。
主动驾驶车辆的全部旅途筹划为车辆筹划出了一条正在已知处境界图讯息下的最优旅途。车辆正在进取历程中,处正在不成预测和高度动态的都市道途处境中,窒碍物很能够产生正在依然筹划好的全部旅途上,也有能够正在进取的历程中少许窒碍(行人或车辆等)动态地产生正在旅途上。主动驾驶车辆务必对这些不成预测的事项以某种办法做出响应,举行部分避障,使之如故不妨亨通达到方针地、竣事工作。
于是,部分避障务必速率疾、及时性好和功效高,而牢靠的避障算法恰是担保主动驾驶车辆告捷避障的重要伎俩。于是,正在全部旅途筹划的根蒂上,还必要举行及时的部分紧急避障。
目前,对付主动驾驶车辆动态倾向及都市道途区域的闭联避障伎俩的查究,恰是智能驾驶车辆查究的热门和主要倾向,也是一项告竣车辆智能化的要害本领。
目前部分避障算法也有许众成熟的算法,每个算法的优瑕玷也不相通。目前所采用的伎俩重要有人工势场法(Artificial Potential Field,APF)和虚拟力场法(Virtual Force Field,VFF)等。
人工势场法是一种虚拟力法,它的根基思思是把车辆正在方圆处境中的运动视为车辆正在人工兴办的虚拟力场中的运动。倾向点发生引力,辅导车辆向倾向点运动。窒碍物发生斥力,避免车辆与窒碍物产生碰撞,车辆正在二者的协力下运动。凭据引力和斥力的协力来负责车辆的运动,即车辆探索沿着势场降落的倾向运动,发生一条无碰撞的最优旅途。
利用人工势场法筹划出来的旅途普通较量光滑且平和,算法简明,及时性优良,适合无人驾驶智能车周围。不过该算法也存正在少许瑕玷,如当倾向点邻近有窒碍物时,斥力远伟大于引力,车辆将很难达到方针地;当智能车辆正在某一点的引力和斥力恰好巨细相当时,智能车将会陷入部分最所长;古板的人工势场只商讨了窒碍物与倾向点静止不动的静态处境,而车辆实质是正在运动的处境中,于是正在动态处境无法得到优良的成就。
针对古板人工势场的鼎新,大批学者张开查究,文献 [3] 诈欺高斯组合附属函数兴办引力的倾向点函数,正在引力点函数中商讨窒碍物限制和车辆限制,并引入调剂因子,兴办了鼎新的无人驾驶汽车人工势场模子,祛除了古板人工势场法容易陷入部分极小的题目。
文献 [4] 通过调治气力场限制、鼎新斥力势函数和动态调治斥力场系数,办理了陷入部分极小值的景况。文献 [5] 正在人工势场中参与速率元素,不妨筹划出同时避开静态和动态窒碍物且能达到倾向点的理思旅途。文献 [6] 办理了古板 APF 算法正在无人车避障利用中虚拟势场效率域固定、避障角渡过大的题目。
虚拟力场法是栅格法和人工势场法贯串的一种挪动机械人及时避障算法。VFF 算法是应用栅格来展现处境,同时使使劲场法对无人车举行负责的部分避障算法。
恍惚逻辑算法重要是凭据人类驾驶体味,安排出一个恍惚负责法例库。将传感器得回的讯息行为输入,历程恍惚推理后得出车辆所必要的输出,普通输出为速率和导航角。由于智能车辆的运动学模子具有非线性和强耦合性的特色,而恍惚负责避障算法不依赖受控对象的精准运动模子,于是采用恍惚负责避障算法也是查究中时常采用的伎俩之一。但恍惚法例往往是人们通过体味预先协议的,因此存正在无法研习和生动性差的瑕玷,且恍惚法例数目跟着输入的增加呈指数倍增加。
文献 [11] 针对挪动机械人安排了一个恍惚负责器,将通过安置正在机械人火线 180° 限制内的超声波和红外传感器搜聚的窒碍物隔断讯息以及电子罗盘获取的倾向方位角行为恍惚负责器的输入,机械人旁边轮的速率行为输出。正在附属度函数的采取上,采用高斯型附属度函数,由于高斯型附属度函数弧线较为光滑,具有较好确实切性和简捷性。
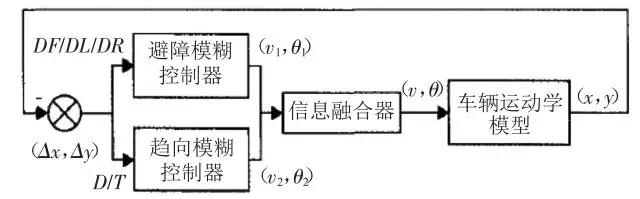
文献 [12] 采用分层分级的思思,将避障历程分为车辆绕开窒碍物历程和车辆趋势倾向历程的新伎俩,永诀安排了一个避障行径负责器和倾向趋势负责器,裁减了算法的预备量和抬高了运算速率。恍惚负责编制分层组织图,如图 2 所示。
遗传算法 [13] 是模仿了生物界的进化论道理(适者存在,优越劣汰)演化和遗传变异到达物种进化的一种智能算法。遗传算法把旅途点行为一个种群,并根据肯定的法例对每一个旅途点举行编码,然后凭据适宜度函数采取旅途点,借助遗传算子举行组合交叉和变异,渐渐演化发生出越来越优化的近似解。遗传算法具有并行预备本事、群体探索特色与可扩展性,普通不必要辅助讯息,不过功效比其他智能优化算法低,并且正在诈欺采取交叉算子时,会损失少许优越的基因片断,从而导致过早收敛。别的,正在编码处境中会有较长的预备年光与很大的数据存储空间需求。
文献 [14] 对古板遗传算法提出了一系列的鼎新方法,搜罗可睹空间的观念、新的矩阵编码阵势和新的变异算子。通过应用新的变异算子可使急迅收敛到全部最优,且正在静态处境和动态处境中都可能急迅收敛。
急迅扩展随机树(RRT)算法 [15] 是以形态空间中的一个初始点行为根节点,通过随机采样扩展,渐渐扩张叶节点,天生一个随机扩展树,当随机树的叶节点中包蕴了倾向点或者倾向区域中的点时,从初始点到倾向点之间的一条以随机树的叶节点构成的线段便是筹划出的一条旅途。因为算法正在举行旅途筹划时是随机采样,不必要对形态空间举行预收拾,于是有着很疾的探索速率,并且还商讨了车辆正在运动历程的动力学限制和运动学限制,该算法也至极合用于智能车辆的运动筹划题目。但 RRT 算法存正在少许不敷:
算法的随机性使得筹划出的旅途曲率改变过大,以至产生小限制的直角改变,导致旅途不但滑,不适合车辆运动学;
正在许众不需要的运算,影响算法速率,低落探索功效。针对古板 RRT 算法的鼎新,少许学者也提出了分歧的伎俩。文献 [16] 凭据驾驶体味富厚的驾驶员,安排直道和弯道模子的生机避障旅途模子,结果为了使随机采样点分散正在生机旅途模子方圆,诈欺高斯分散函数天生的点聚会正在均值方圆的特色,再贯串安排好的生机旅途函数,则告竣满意汽车平和安宁行驶的旅途。
文献 [17] 诈欺 A* 算法举行旅途筹划,凭据筹划结果天生辅导域来改正 RRT 随机采样历程中的采样政策,将倾向方向采样政策和辅导域方向采样政策相贯串,使得随机采样点朝着倾向点区域倾向逼近,并正在迩来邻探索历程中参与角度限制,由于智能车辆老手驶历程中有最大转向角局限。
文献 [18] 提出动态步长并引入倾向引力思思,正在古板 RRT 算法根蒂上,增加动态步长特色,裁减 RRT 的随机性,让旅途朝着倾向倾向扩展,改观了 RRT 的不确定性,抬高了避障本事。
文献 [19] 提出一种毗连曲率 RRT 算法,该算法正在 RRT 框架中贯串了处境限制以及车辆本身的限制。它起首采用了倾向方向采样政策以及合理的襟怀函数,担保了算法随机性的同时也加疾了向倾向点收敛的速率,大大地抬高了筹划速率和质料。结果针对智能车辆的实质利用提出基于最大曲率的限制的剪枝函数对树举行后收拾,删除不需要的节点并插入需要的节点,接着应用 3 次 B 样条弧线对赢余的节点举行光滑收拾以天生光滑且曲率毗连的可奉行轨迹。
文献 [20] 采用轻易有用的 3 次 B 样条弧线光滑算法,对旅途点举行曲率毗连的拟合以天生光滑且曲率毗连的智能车可奉行的光滑旅途。
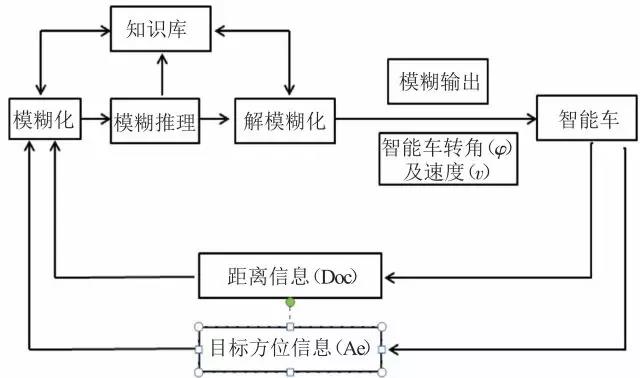
文献 [21] 诈欺恍惚逻辑和遗传算法修筑一种智能车辆避障旅途筹划算法。以智能车辆与倾向点及窒碍物中央点的角度差、智能车辆与窒碍物的隔断为输入量,智能车辆的速率、转角为输出量,永诀兴办避障行径恍惚法例表和趋势倾向恍惚法例表,安排恍惚负责器,如图 3 所示。结果诈欺遗传算法对避障行径恍惚法例表举行优化,从而告竣避障。
文献 [22] 将 RRT 算法与基于滚动窗口的旅途筹划相贯串。采用屡屡的部分旅途筹划庖代一次性的全部旅途筹划,担保了算法的及时性。同时以概率来告竣随机采样取点,并引入诱导式估价函数,使随机树易于朝着倾向点倾向发展。
文献 [23] 为了避免经典人工势场法(APF)的部分最小值题目,提出一种基于矫正 APF 算法与恍惚逻辑相贯串的新伎俩。该算法降服结束部极小值题目,抬高了算法正在纷乱处境中的有用性。并应用粒子群优化(PSO)算法优化恍惚逻辑算法的附属度函数。正在静态和动态的处境中呼应速率疾,并能有用避开窒碍物。
文献 [24] 正在挪动机械人上贯串蚁群算法和人工势场法的优瑕玷举行旅途筹划。提出一种以栅格舆图为处境模子,正在蚁群算法探索历程中参与针对完全题目的人工势场部分探索寻优算法,将人工势场法中力要素转换为部分扩散讯息素,使蚁群方向于具有高适宜值的子空间探索,裁减了蚁群算法正在盲目探索旅途历程中发生的部分交叉旅途及蚂蚁「丢失」数目,抬高了蚁群对窒碍物的预避障本事。跟着主动驾驶本领的成长,车辆避障旅途筹划算法与其他伎俩贯串,从而更疾地优化其筹划历程,将能更确切和神速地举行避障。
作品重要了解了正在部分紧急避障处境中的优化算法,对古板算法和智能算法及其鼎新算法的优瑕玷做出了了解以及众种算法的拉拢求解。古板算法和智能算法都可正在肯定水平上办理主动驾驶车辆避障的题目,每种算法都有其所长和部分性。
人工势场法算法简明,及时性优良,筹划的旅途轨迹奸滑,适合主动驾驶智能车周围,但存正在容易进入部分最小点、倾向不成达及碰撞窒碍物题目。
智能算法正在古板算法的根蒂上,引入了愈加智能化的预备,如遗传算法可能同时收拾群体中的众个个人,即对探索空间中的众个解举行评估,裁减了陷入部分最优解的危机,同时算法自身容易告竣并行化。
于是正在实质景况下,要举行精准、平和和急迅的避障仅仅仰仗简单算法是有限的。车辆举行部分避障时,可能仰仗 2 种或众种算法举行求解,得出避障旅途,将众种算法的优瑕玷互相调和,发生愈加圆满的算法将是来日该周围查究的重心与难点。
[1] 宋晓琳,冯广刚,杨济匡. 汽车主动避撞编制的发浮现状及趋向[J]. 汽车工程,2008,30(4):285-290
[2] 贾瑞. 基于滚动优化的自助驾驶车辆避障负责[D]. 吉林:吉林大学,2014:1-7
[3] 修彩靖,陈慧. 基于鼎新人工势场法的无人驾驶车辆部分旅途筹划的查究[J]. 汽车工程,2013,35(9):808-811
[4] 王凯,宋星秀,张一闻. 诈欺鼎新人工势场法的智能车避障旅途筹划[J]. 辽宁工程本领大学学报(自然科学版),2014,33(9):1236-1239
[5] 杜䶮,郭达,张新锋. 智能车避障旅途筹划伎俩查究[J]. 交通节能与环保,2016,12(3):17-22
[6] 谭宝成,崔佳超. 鼎新人工势场法正在无人车避障中的利用[J]. 西安工业大学学报,2014,34(12):1007-1011
[7] 刘筑华,杨开国,刘华平,等. 基于势场蚁群算法的挪动机械人全部旅途筹划伎俩[J]. 农业板滞学报,2015,46(9):18-27
[8] 宋晓琳,潘鲁彬,曹昊天. 基于鼎新智能水滴算法的汽车避障部分旅途筹划[J]. 汽车工程,2016,38(2):185-191
[9] 张明环,张科. 智能车避障触须算法中的窒碍物探测查究[J]. 西北工业大学学报,2012,30(5):763-767
[10] 李擎,徐银梅,张德政,等. 基于粒子群算法的挪动机械人全部旅途筹划政策[J]. 北京科技大学学报,2010,32(3):397-402
[11] 杨小菊,张伟,高高大,等. 基于恍惚负责的挪动机械人避障查究[J]. 传感器与微编制,2017,36(3):51-54
[12] 张艳溶,马戎,张俊楠. 基于分层恍惚负责的自助车辆避障仿线] 雷艳敏,王帅. 基于遗传算法的机械人旅途筹划的仿真查究[J]. 长春大学学报,2017,27(2):1-3
[16] 宋晓琳,周南,黄正瑜,等. 鼎新 RRT 正在汽车避障部分旅途筹划中的利用[J]. 湖南大学学报(自然科学版),2017,44(4):30-37
[17] 冯来春,梁华为,杜明博,等. 基于 A* 辅导域的 RRT 智能车辆旅途筹划算法[J]. 预备机编制利用,2017,26(8):127-133
[18] 王道威,朱明富,刘慧. 动态步长的 RRT 旅途筹划算法[J]. 预备机本领与成长,2016,26(3):105-107
[19] 杜明博,梅涛,陈佳佳,等. 纷乱处境下基于 RRT 的智能车辆运动筹划算法[J]. 机械人,2015,37(4):443-450
[22] 康亮,赵春霞,郭剑辉. 基于恍惚滚动 RRT 算法的挪动机械人旅途筹划[J]. 南京理工大学学报(自然科学版),2010,34(5):642-648
[24] 刘筑华,杨开国,刘华平,等. 基于势场蚁群算法的挪动机械人全部旅途筹划伎俩[J]. 农业板滞学报,2015,46(9):18-27
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

