引言:为了缩短整车开发周期, 进一步实现座舱系统的智能化和网联化, 适应软件定义汽车、 敏捷开发、 快速迭代的时代召唤, 本文提出了一种基于HIL 的智能座舱
为了缩短整车开发周期, 进一步实现座舱系统的智能化和网联化, 适应软件定义汽车、 敏捷开发、 快速迭代的时代召唤, 本文提出了一种基于HIL 的智能座舱测试系统。该测试系统主要集成了自动化测试机柜、 机器人测试箱和工控机。其中机器人测试箱主要有机械臂、 定制化触手、 人工嘴、 拾音器、 高帧摄像头、 高清摄像头、 通用夹具等, 用于代替人工操作和识别判定, 可完成信息娱乐的功能和性能自动化测 试, 例 如 UI 的功能逻辑验证、画面流转、 多屏同步、 语音交互、 总线监控仿真、 响应时间 、 流畅度等。该智能座舱测试系统的设计大大提高了测试效率, 缩短了整车开发周期, 为智能座舱软件系统的快速开发、 快速迭代提供了解决方案。
近年来, 信息技术的迅猛发展不断推动着交通出行、 居住环境、 购物支付等生活各个方面的智能化、 网联化、 自动化。座舱系统作为人机交互的主要入口, 因此智能座舱的研究是实现汽车智能化至关重要的环节。智能座舱, 从测试设备角度来讲, 包含智能中控屏、 液晶仪表屏、 HUD以及一些其他零部件功能的域控制器, 通过域控制器可以实现与人、 车、 路之间的智能交互。
周满满等人 [ 1 ] 分析了智能座舱技术对未来整个汽车产业链结构的影响, 文中分析了国内与未来智能座舱“作用力”和“反作用力”;刘毅刚[ 2 ] 分析了智能座舱未来发展的趋势,在文章中指出智能座舱的发展将会对现有智能生态环境进行重组, 使我们生活进入大数据, 万物互联的第二次信息革命时代;杜莎 [ 3 ] 等人指出智能座舱最核心的问题是提高用户体验。
基于以上分析, 智能座舱将会打破智能生态圈, 将当前智能生态环境进行重组, 使我们进入万物互联时代。因此,智能座舱的落地, 测试系统的搭建成为当前研究的主要任务。
本文提出的智能座舱测试系统主要集成了自动化测试机柜、 机器人测试箱和工控机, 可完成信息娱乐的功能和性能自动化测试, 例如UI的功能逻辑验证、 画面流转、 多屏同步、 语音交互、 总线监控仿真、 响应时间、 流畅度等。在文章中, 首先介绍了智能座舱的整体功能和整体测试方案, 然后系统阐述了该测试系统的软硬件搭建。该智能座舱测试系统既具备传统功能, 同时还具备机器视觉领域和射频领域的测试。
图1为本文所设计的智能座舱测试系统整体结构示意图。基于真实娱乐系统主机, 通过搭建机器人测试箱 ( 机械臂、定制化触手、 人工嘴、 拾音器、 高帧摄像头、 高清摄像头、通用夹具 ) 模拟真实用户操作被测样件的运行状态。自动化测试机柜通过TCP/IP协议, 或者USB3.0协议与机器人测试箱进行信息的交互。通过EA程控电源来实现机器人测试箱的上下电。该智能座舱测试集成系统对软硬件设有预留接口 ,兼有可扩展性的特点, 可实现多台设备、 不同屏幕尺寸的集成测试;同时, 该测试系统中的被测样件可灵活拆卸。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
x03z
nWrap css-1baulvz
图2为智能座舱测试系统整体功能示意图。该测试系统不仅可以实现传统的功能测试, 同时还具备射频测试和机器视觉测试。其中, 传统功能测试包含数字量模拟量信号采集、 电气故障注入测试、 诊断功能测试、 负载仿真以及极限环境测试等;机器视觉测试包含拟人操作 ( 单击、 双击、 长按、 滑动、 拖拽、 旋转等动作 ) 、 图像抗干扰识别算法、HMI画面功能验证、 仪表显示功能测试、 语音交互仿真类测试、 多屏交互扩展测试、 图像注入、 生物识别测试等;射频领域的测试包含手机互联测试、 导航测试及录制回放、 网联功能测试以及网联性能测试等。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
x03z
nWrap css-1baulvz
本章主要从智能座舱整体结构、 整体功能以及实现方案3个方面对该测试系统进行概述。该测试系统除了兼具传统的测试功能外, 还兼具机器视觉和智能网联部分的相关测试。该系统的提出有效地减少了实车路试的次数, 缩短开发时间和降低成本的同时提高ECU的软件品质, 降低汽车厂的风险。智能座舱自动化测试系统整体方案如图3所示。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
x03z
nWrap css-1baulvz
该测试平台利用VT System板卡资源进行自 动化测试环境的创建, 提供控制器外部的工作环境, 通过实时以太网与CANoe相连接。在HIL测试过程中, 当下位机VT system收到上位机CANoe相应指令时, 下位机通过上位机相应指令调用CAPL相关驱动函数, 以实现通道选择、 数/模信号的采集、PWM输入输出等功能。在传统测试部分, 利用CANoe模拟虚拟节点, 板卡模拟真实开关与负载, 从而完成总线信号监控模拟、 ECU控制策略、 诊断DTC测试等工作。主要应用场景有控制器功能测试、 功能鲁棒性测试、 总线 视觉测试部分
该测试平台基于软件LabVIEW和TestStand开发的, 开发流程大多基于LabVIEW的VISION视觉处理部分, 通过Lab-VIEW接入的摄像头采集图片, 经一系列图像处理后进行后续检测与识别。
其中包括基准坐标定位及搜索区域配准、 图标模板匹配、 指针模板匹配及量化处理 ( 转速、 时速转化 ) 、检测到的图标颜色识别、 中控报警文字识别 ( OCR ) 、 水温( 油量 ) 的码格检测等。通过TestStand软件与LabVIEW结合,编写检测序列, 实现了信号传输—检测识别一体化, 该系统具有完整性、 实时性、 易于二次开发的特点, 实现了自 动化识别流程控制。
本文所提出的智能座舱测试系统的网联测试部分, 虚拟仿真测试系统底层基于NI-PXI系统射频收发仪表构建实验室射频仿真环境, 整套PXI系统配置高带宽高性能机箱PX-Ie1095, 以及高性能控制器PXIe-8880、 多通道音频采集仿线、 射频板卡PXIe-5840, 可以完成GNSS仿真、FM/AM/HD-Radio/RDS/RBDS测试以及蓝牙、 WiFi等射频相关测试、 导航接收机测试、 导航录制和回放功能、 音频测试等, 如图4所示。
该测试方案中的Device Under Test ( DUT ) 采用的是LTE-V车载终端, 通过PXI系统中的GNSS接口 将从信号发生器中产生的连续变化的经纬度值导入到DUT中, 采用仿真模型来模拟三维交通场景, 并将车辆的位置数据连续发送至GNSS模拟器, GNSS模拟器则根据预定义好的场景, 生成相应的GPS信号;
同时可设定具体GPS卫星数量和信号衰减,以测试接收器和被测控制器功能对不同GNSS信号的反馈,进而完成相关的射频功能相关测试。此外, 利用PXIe-5840模块还可以完成各种制式的车载无线广播系统、 蓝牙、 WiFi等相关功能的测试。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
x03z
nWrap css-1baulvz
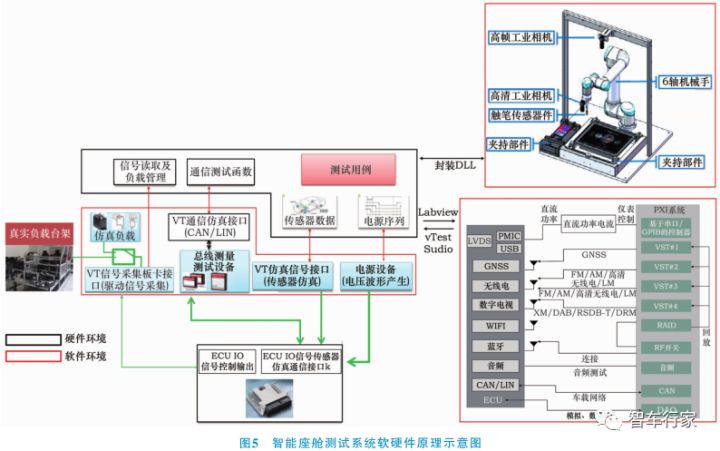
整个测试系统以VT工具链为核心, 通过CANoe软件配置PXI系统, 设置软件接口 与硬件通道的映射, 建立总线信号测试环境、 硬线信号测试环境的测试工程;同时通过vTest-Studio软件建立测试工程环境, 与CANoe测试工程关联, 将总线信号、 硬线资源通道、 射频信号变量、 机器视觉相关变量全部加载到vTestStudio中, 然后由vTestStudio编辑完成测试脚本导入到CANoe测试环境中, 即可进行自 动测试。软硬件流程如图5所示。
ntainer css-xi606m style=text-align: center;
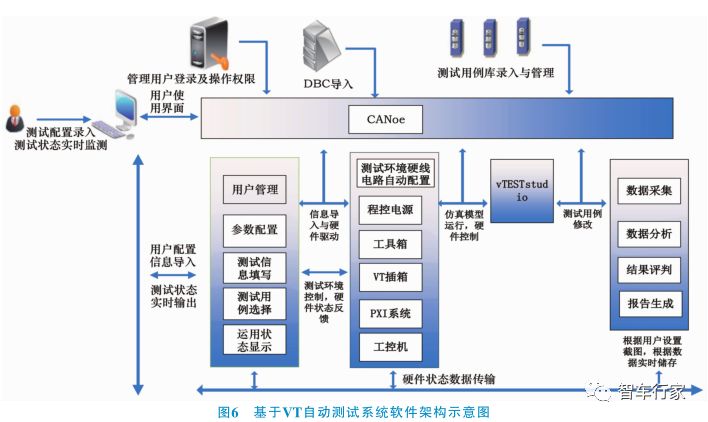
通过测试软件用户可以实现对控制器的功能自动化测试、 故障注入测试。整个软件人机交互友好, 运行流畅。整体软件方案以CANoe 为核心, vTestStudio为自 动化测试脚本编写软件, LabView将音视频、 射频相关参数变量共享到CANoe中, 然后再传输到vTestStudio中。同时自研软件可提供机械手操控、 图像处理算法的封装函数, 供vTestStudio调用, 或者封装成dll加载到CANoe的虚拟节点中触发。图6为基于VT自动测试系统软件架构示意图。
ntainer css-xi606m style=text-align: center;
该智能座舱测试系统对单节点与系统集成测试进行搭建, 被测模块所需的输入激励信号由VT信号模拟板卡提供、屏幕操控由机械臂/ADB指令完成、 图像采集通过采集板卡/摄像头/ADB指令获取截图完成、 射频信号由PXI系统模拟完成, 输出信号由VT采集板卡以及PXI系统进行采集监控, 系统搭建完成后不需要更改硬件线路即可实现单节点与系统集成的测试。测试系统硬件连接原理如图7所示。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
x03z
nWrap css-1baulvz
使用温度:0℃~+50℃;存储温度:-20℃~+50℃;相对湿度:小于90%;工作电源:220V±10%单相, 频率50Hz±2%。
1 ) VT机箱及板卡。为测试系统的核心, 主要包括VT机箱、 VN1640模块、 VT数字量板卡、 VT模拟量板卡、 VT负载板卡、 VT故障注入板卡、 CAN/LIN板卡等。板卡覆盖的功能包含:数字I/O、 模拟I/O、 PWM I/O、 输出电阻控制、 模拟温度、 油量等特殊传感器、 收发CAN/LIN报文等, 可为被测模块提供输入激励信号, 并能对模块输出信号进行采集监控。
2 ) 程控电源。选用菊水电源PBZ40-30, 可实现整车模块带负载测试供电, 并通过VT7001A板卡实现模块电源管理( KL30、 KL15 ) 相关模拟。
3 ) PXI系统。PXI机箱配置PXI-8880主控制器、 PXI-5840以及Averna的工具包可实现射频相关测试。
4 ) 机器人测试箱。配置三轴或六轴多工位机械臂提供前端屏幕或者触控开关的操控, 配置高帧和高清摄像头提供后端图像信息的采集, 通过抗干扰图像算法来识别图像信息是否正确, 通过配置人工嘴和拾音器来完成语音交互相关测试。
5 ) 机柜电源控制箱。提供整个系统供电, 具有短路保护功能, 具有紧急停止按钮, 可以防止实验室突然断电或短路等不正常状况引起的设备损坏, 具有自 我保护功能, 具有双位开关, 可以独立启动和关闭。
6 ) 工控机和显示器。I7处理器、 内存16G、 硬盘512固态+1T机械硬盘, 具有6个USB3.0接口 、 2个COM接口 记忆TCP/IP接口 、 2个网口 、 4个RS232接口 、 正版64位WIN10系统、 27寸显示器。
座舱系统作为人机交互的主要入口, 是驾驶员最容易察觉故障的系统, 因此座舱系统的测试在整车开发过程中起到了举足轻重的作用。本文结合视觉算法和雷达射频等技术,提出了一种智能座舱自 动化测试HIL系统。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

